SPRacing H7 Extreme¶
SPRacingH7 Extreme 是由以下公司生产的(飞行)控制器 严肃专业赛车 .
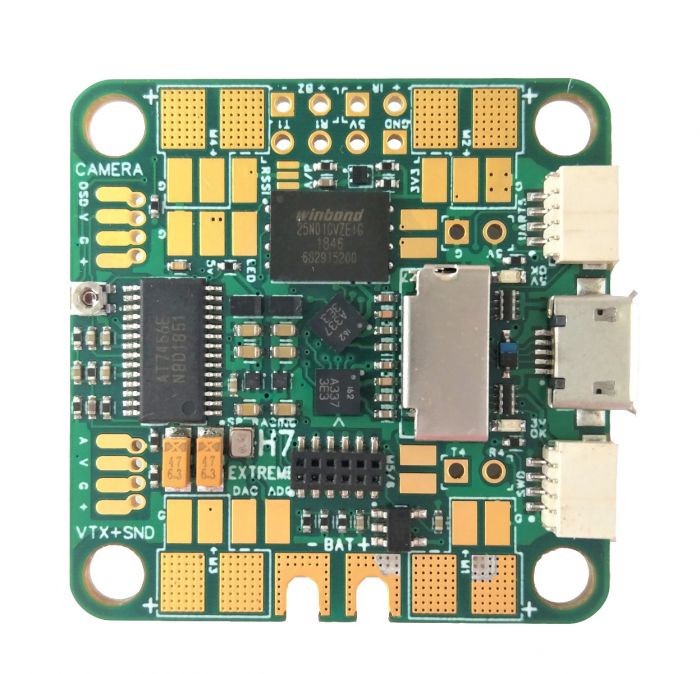
规格¶
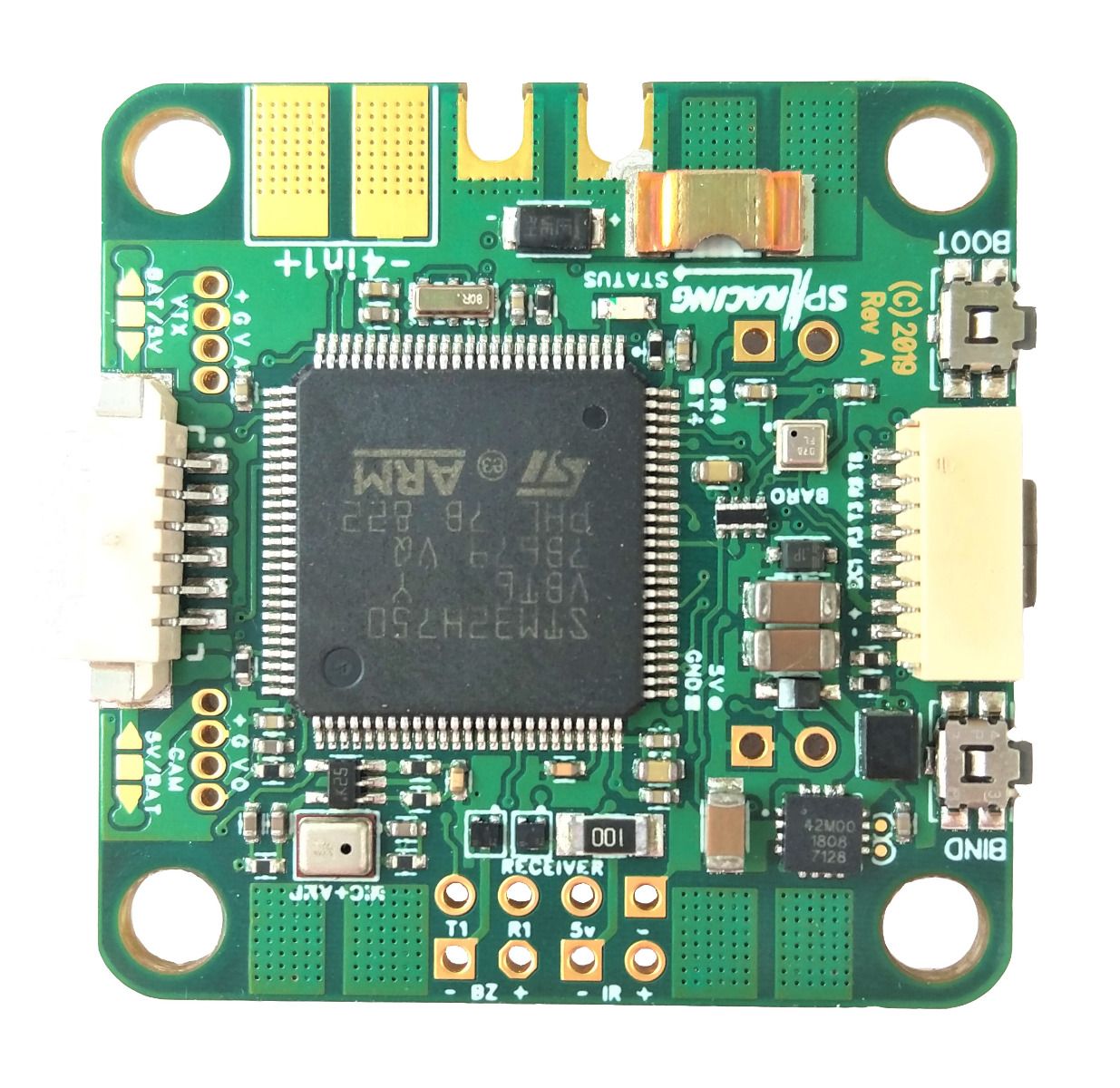
处理器
运行频率为 400 MHz 的 STM32F750 ARM 32 位处理器
OSD: AT7456E
128MB 串行 NOR 闪存通过 QuadSPI 用于程序存储
传感器
2x ICM20602
BMP388 气压计
电压传感器(2-6S)
电流传感器(连续 110A/ 最大 130A)
外设连接
7 个 UART
微型 SD 卡
微型 USB
I2C
模拟 RSSI 输入
摄像头和 VTX
有源蜂鸣器
电源
2-6S 直流输入电源
5V, 1A BEC,用于外设
引脚¶
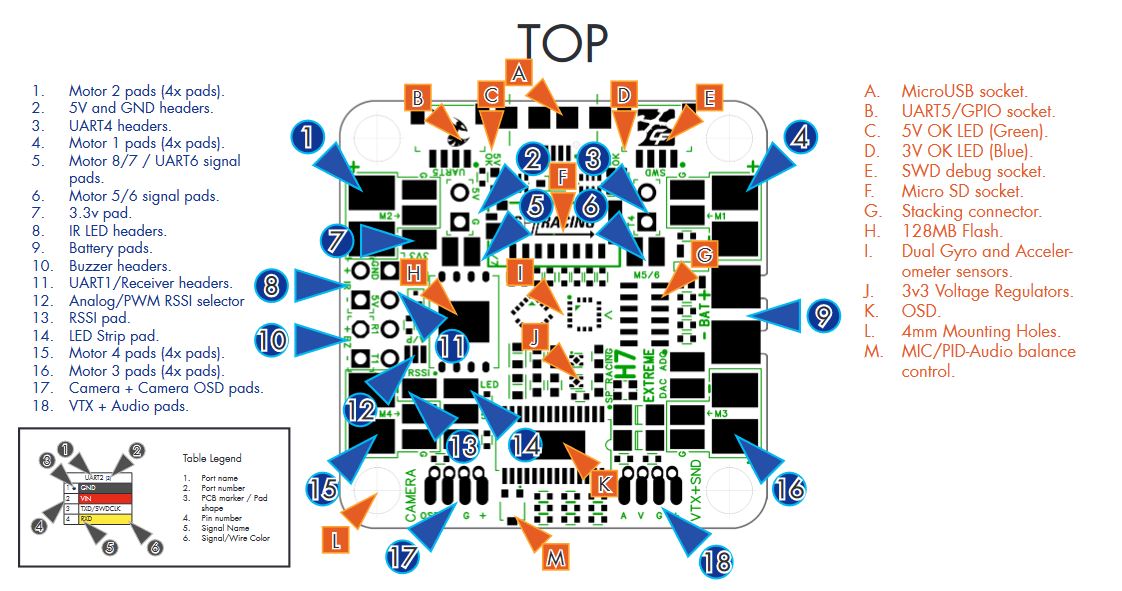

备注
请务必为摄像机、VTX 和 VTX 配置电压选择垫。
VTX 电源开关¶
设置 RELAYx_PIN 至 "81",用于打开/关闭 VTX 电源垫。
然后选择一个 RC 控制通道 (Chx),并设置其 RCx_OPTION 到相应的继电器(1-4),您已在上面设置了其引脚参数。
例如,使用通道 10 通过继电器 2 控制电源:
RELAY2_PIN = "81"(默认设置为继电器 2,但可以更改)
RC10_OPTION = "34"(继电器 2 控制)
备注
设置上述继电器开/高电平将关闭该电源。如果未指定任何继电器,则默认为接通电源。
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1(具有 DMA)通常为 RC 输入
SERIAL2 = Telemetry2 = USART2(有 DMA)(只有 TX 引脚可用)
SERIAL3 = GPS1 = USART3(有 DMA)
SERIAL4 = GPS2 = UART4(有 DMA)
SERIAL5 = USER = UART5(有 DMA)
SERIAL6 = USER = USART6(如果有 PWM 输出 7(TX6)和 8(RX6),则可用 USART6 代替 7(TX6)和 8(RX6))。 BRD_ALT_CONFIG = 1)
serial8 = user = uart8
串行端口协议(Telem、GPS 等)可根据个人喜好进行调整。
RC 输入¶
RC 输入配置在 R1(UART1_RX)引脚上。它支持除 PPM 以外的所有 RC 协议。参见 无线电控制系统 了解特定遥控系统的详细信息。 serial1_protocol 默认设置为 "23",以启用此功能。
SBUS/DSM/SRXL 连接到 R1 引脚,但 SBUS 要求 serial1_options 设置为 "3"。
FPort 需要连接 T6 和 serial1_options 设置为 "7"。
除 R1 外,CRSF 还需要 T1 连接,并自动提供遥测功能。设置 serial1_options 为 "0"。
SRXL2 需要与 T1 连接,并自动提供遥测功能。设置 serial1_options 到 "4"。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
OSD 支持¶
SPracing H7 Extreme 的板载 OSD 可通过以下设置使用 OSD_TYPE 1(MAX7456 驱动器)。
智能端口遥测¶
SmartPort (Sport) 遥测设置默认直接连接到 UART2 TX 引脚,无需外部转换器。
Dshot 能力¶
所有电机/伺服输出均支持 DShot 和 PWM。电机输出 1-4 具有双向 DShot 功能。不过,混合使用 DShot 和正常 PWM 操作的输出端受组别限制,即如果要为组别中的某个输出端启用 DShot,则需要将该组别的所有输出端配置和用作 DShot,而不是 PWM 输出端。必须相同的输出组(PWM 速率或 DShot,当配置为普通伺服/电机输出时)有1-4, 5/6, 7/8, 9/10.
电池监控器设置¶
这些默认设置应该已经设置。但是,如果丢失或更改了这些设置:
使用这些参数设置启用电池电量监控器 :
然后重新启动。
BATT_VOLT_MULT 10.9
batt_amp_pervlt 28.5
RSSI 输入¶
RSSI 引脚可连接模拟或 PWM RSSI 输入。设置 RSSI_ANA_PIN = 根据需要调整其他 RSSI 参数,请参见 接收信号强度指示(RSSI).
NeoPixel LED¶
LED 输出默认设置为与 NeoPixel LED 一起使用。
固件¶
可以找到这些电路板的固件 这里 子文件夹中的 "SPracingH7"。
加载固件¶
由于该电路板将飞行控制软件存储在外部闪存中,因此初始固件加载应使用 SPRacing SSBL .请按照加载 PX4 固件的说明加载 ArduPilot。
A 便捷脚本 也可用于执行所需步骤。
也可以通过 DFU <common-loading-firmware-onto-chibios-only-boards>`__加载 ArduPilot 固件和引导加载程序,但这样做会使保修失效。