brainFPV RADIX2 HD¶
BrainFPV RADIX 2 HD 是一款飞行控制器,主要用于使用高清(数字)FPV 系统的第一人称视角 (FPV) 应用。
规格¶
处理器
STM32H750 ARM(480MHz)
启动时从 SD 卡加载 16MB 外部程序闪存
传感器
BMI270 IMU(加速度、陀螺仪)
DPS310 气压计
电压传感器(最高 12S)
电源
2S - 8S 锂电池输入电压
9V、2A BEC,用于为视频发射器供电
5V, 1.5A BEC,用于内部和外设
接口
8x PWM 输出 双向 DShot 功能
1x RC 输入
CAN 总线端口
7 个 UART/串行接口,用于 GPS 和其他外设。UART6 的 RX 和 TX 可作为第 9 和第 10 PWM 输出重新分配任务
用于外部罗盘、空速等的 I2C 端口。
用于程序固化、记录等的 microSDC 卡。
USB-C 端口
模拟电流检测输入
蜂鸣器输出
模拟 RSSI 输入
尺寸和规格
37 毫米 x 37 毫米(孔间距 30.5 毫米)
7g
购买地点¶
用户手册和接线¶
引脚¶
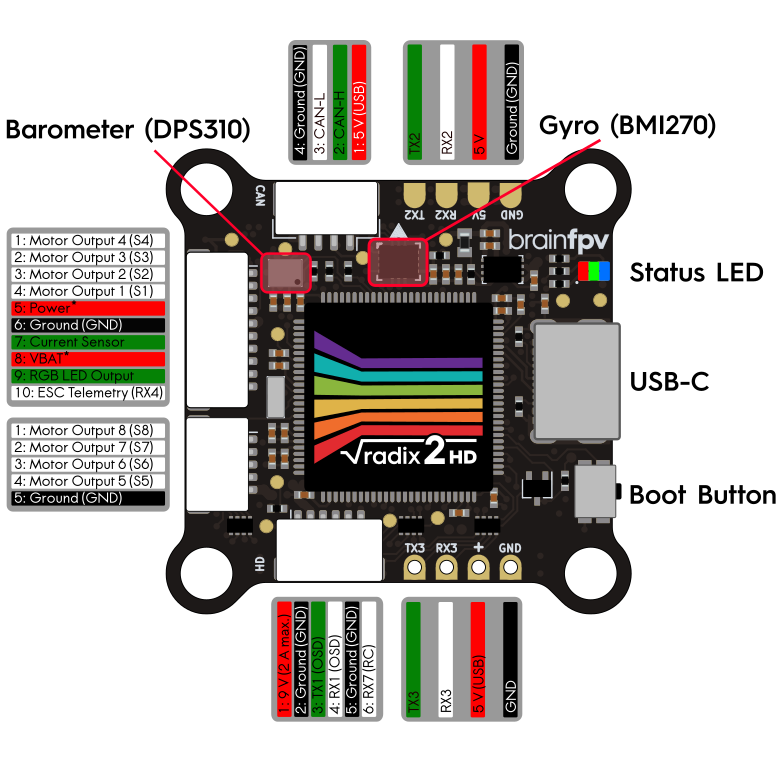
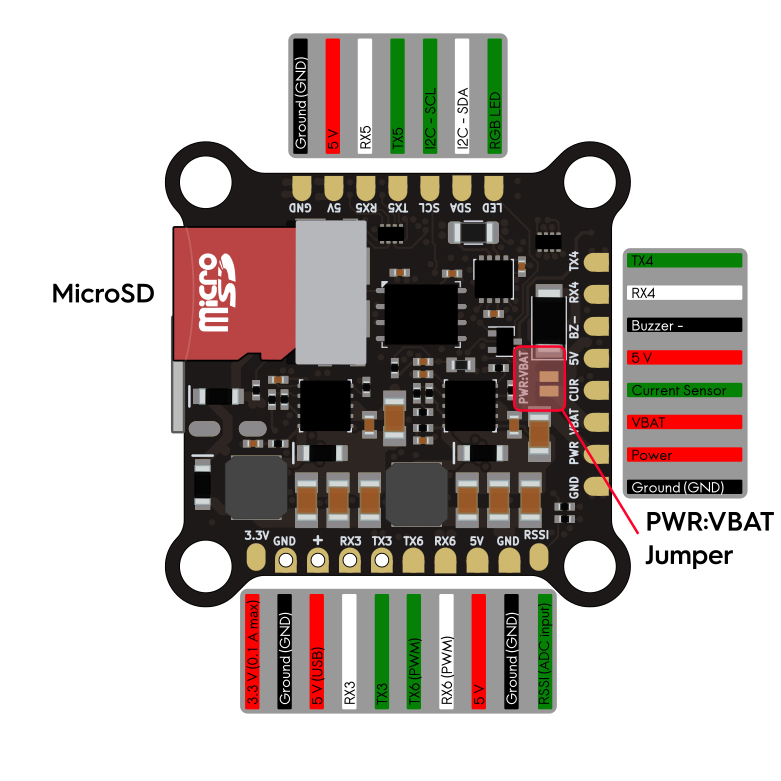
有关如何使用 "PWR:VBAT "跳线,请参阅上述《用户手册》链接。
默认 UART 顺序¶
在上述引脚布局中,UART 的标记为 Rn 和 Tn。Rn 引脚是 UARTn 的接收引脚。Tn 引脚是 UARTn 的发送引脚。
SERIAL0 -> USB
SERIAL1 -> UART1(支持 DMA,DJI 连接器上的 MSP DisplayPort OSD)
SERIAL2 -> UART2(支持 DMA,GPS)
SERIAL3 -> UART3(启用 DMA,RCin)
SERIAL4 -> UART4(电调连接器上的 RX,用于电调遥测)
SERIAL5 -> UART5(备用)
SERIAL6 -> UART6(备用,默认为 PWM 9 和 10,请使用 BRD_ALT_CONFIG = 1(UART)
SERIAL7 -> UART7(仅 DJI 连接器上的 RX 引脚)
RC 输入¶
RX3 旁边的遥控接收器 5 V 垫("+")也由 USB 供电,无需连接主电池即可轻松安全地进行配置。
RX3 引脚可用于所有 ArduPilot 支持的单线接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,FPort 以这种方式连接时,只能提供 RC 而不提供遥测功能。
如果要在 Fport、CRSF 和 SRXL2 接收器中使用 CRSF 和嵌入式遥测功能,也要使用 TX3 引脚。
不支持 PPM。
SBUS 无需特殊配置。
FPort 需要连接 TX3 和 serial3_options 设置为 "7"。
除 RX3 外,CRSF 还需要 TX3 连接,并自动提供遥测功能。设置 serial3_options 为 "0"。
SRXL2 需要与 Tx6 连接,并自动提供遥测功能。设置 serial3_options 到 "4"。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
可通过以下设置对 RX6 进行配置,以接收来自 DJI 空中单元的 RCin :ref:`SERIAL3_PROTOCOL<SERIAL3_PROTOCOL>; 为 "23 "以外的值,并设置 :ref:`SERIAL7_PROTOCOL<SERIAL7_PROTOCOL>; 改为 "23"。
电机/伺服输出¶
RADIX 2 HD 共有 10 个 PWM 输出。所有输出均支持 PWM 和 DShot。前 8 个输出也支持 BDSHOT,位于两个 4 合 1 ESC 接口上。PWM 输出以每 2 个通道为一组,同一组中的所有通道需要使用相同的配置/速率。
PWM 1-2 第 1 组
PWM 3-4 第 2 组
PWM 5-6 第 3 组
PWM 7-8 第 4 组
PWM 9-10 第 5 组(默认情况下在 TX6 和 RX6 焊盘上输出,也可重新配置为 SERIAL6 使用,方法如下 BRD_ALT_CONFIG = 1 )
模拟输入¶
RADIX 2 HD 有 3 个模拟输入端:
ADC 引脚 10 -> 电池电压(VBAT 引脚,内置 1:17.6 分压器)
ADC 引脚 3 ->电池电流传感器,最大 3.3V(CUR 引脚)
ADC 引脚 11 ->RSSI 电压监控,最大 3.3V(RSSI 衬垫)
视频发射机功率控制¶
可使用 ArduPilot 中的 RELAY 功能关闭 9V 输出电源。默认情况下是打开的,但可以将其关闭:
例如,使用 RC 通道 10 通过继电器 2 控制电源开关:
RELAY2_PIN = "81"
RC10_OPTION = "34"(继电器 2 控制)
开关上的低电平将关闭对 9V 焊盘的供电。
电池监测¶
使用内置分压器,RADIX 2 HD 可监控高达 12S 的电池电压。电路板本身可由高达 8S (35 V) 的电池电压供电,并且有一个跳线可将同一针脚用于电池电压监控和电路板供电。
警告
在焊接 "PWR:VBAT "跳线的情况下,用超过 8S (35 V)的电压为电路板供电将永久损坏电路板。有关详细信息,请参阅上述链接的《用户手册》。
除电压检测外,电路板还带有一个外部电流传感器输入端。
与典型的 4in1 电调配合使用的参数已经默认设置。值为 batt_amp_pervlt 可能需要更改,以匹配您的电调:
默认参数设置为
使用这些参数设置启用电池电量监控器 :
BATT_MONITOR =4
然后重新启动。
BATT_VOLT_MULT 17.6
batt_amp_pervlt 28.5
加载固件¶
RADIX 2 HD 使用专有的引导加载程序,需要定制文件格式的固件文件。获取固件文件的方法有以下几种。获得文件后,将其复制到 USB 驱动器上,当 RADIX 2 HD 处于启动加载器模式(连接 USB 时按住 BOOT 按钮并松开),将其连接到计算机时会出现该 USB 驱动器。完成复制后,安全地移除驱动器。此时,RADIX 2 HD 将重新启动并运行 ArduPilot 固件。
备注
使用 ArduPilot 时,必须插入 microSD 卡,否则固件将无法运行。
选项 1:从 BrainFPV 网站下载固件文件¶
获取 RADIX 2 HD 固件文件的最简单方法是从 BrainFPV 网站下载。您可以 这里.
选项 2:从 ArduPilot 固件服务器下载固件¶
从 ArduPilot 固件服务器.确保您下载的是 "RADIX2HD "目标的文件。例如,ArduCopter 的 ELF 文件名为 "arducopter.elf"。目前只有 4.5("最新")版本可用。
要在 RADIX 2 HD 上使用 ELF 文件,需要使用 BrainFPV Firmware Packer 对其进行转换。该工具使用 Python 实现,因此需要安装 Python。
如果使用 Linux,请使用软件包管理器安装 Python 3。如果使用的是 Windows,请从 Python 网站下载 Python 3 安装程序并运行。安装时,确保选择 "Add Python to PATH"(将 Python 添加到 PATH),这样就能在 Windows 命令提示符下使用 Python 了。
安装 Python 后,启动命令提示符并使用以下命令安装 BrainFPV 固件打包程序:
核心 安装 https://github.网/BrainFPV/brainfpv_fw_packer/档案馆/主要.压缩
安装后,您可以使用以下命令将 "arducopter.elf"(或其他飞行器 elf 文件)文件转换为可与 RADIX 2 HD 一起使用的 "arducopter.bin "文件:
brainfpv_fw_packer.py --名字 自动飞行器 --于 自动飞行器.小精灵 --向外 自动飞行器.箱柜 ^
--设计 radix2hd -t 固件 -b 0x90400000 -z --页眉
方案 3:自行编译固件¶
如果您有一个工作 ArduPilot 构建环境您也可以自己编译固件,然后将其转换为 BrainFPV 引导加载程序所需的格式。为此,您还需要使用 BrainFPV 固件打包程序。使用上图所示的 "pip install "命令安装它。
对于 Copter,请按以下步骤构建固件:
./waf 配置 --官方 RADIX2HD
./waf 旋翼飞行器
RADIX2HD 可用于制造其他飞行器,但主要针对旋翼飞行器应用。然后使用固件打包脚本创建可与 BrainFPV 引导加载程序一起使用的固件文件:
./图书馆/AP_HAL_ChibiOS/hwdef/RADIX2HD/打包固件.吁 旋翼飞行器
要使用它,请将生成的 arducopter_{VERSION}_brainfpv.bin 复制到 RADIX 2 HD 进入引导加载器模式时出现的 USB 驱动器中。