归档:在 Linux 上为 Flymaple 构建 ArduPilot¶
警告
存档文章
ArduPilot 不再支持 FlyMaple。
备注
ArduPilot 中对 FlyMaple 的支持已于 2016 年 5 月移除。本文档适用于旧版本
关于 Flymaple¶
APMPilot 固件已移植到以下设备上运行 Flymaple
Flymaple 是一款基于 75MHz ARM Cortex-M3 处理器的廉价电路板。
它包括 10DOF 传感器(加速计、陀螺仪、磁力计和气压计)。
如何在 Linux 上为 Flymaple 构建 APM。¶
要为 Flymaple 建立 ardupilot,您需要一些额外的资源。
我假定您会将它们安装在您的主目录下。
不过,只要对 PATH 和 config.mk 进行适当修改,它们确实可以去任何地方。
cd ~ git clone https://github.com/mikemccauley/libmaple.git cd libmaple wget http ://static.leaflabs.com/pub/codesourcery/gcc-arm-none-eabi-latest-linux32.tar.gz tar xvzf gcc-arm-none-eabi-latest-linux32.tar.gz export PATH=$PATH:~/libmaple/arm/bin cp main.cpp.example main.cpp make
在此阶段,你可以使用 "make install "测试你的 flymaple CPU 和上传过程。
这将向 Flymaple 板上传一个简单的 LED 闪烁程序。
现在下载 ardupilot APM:
CD ~
git 复制 --递归-子模块 https://github.网/ArduPilot/ardupilot.git
CD ardupilot
现在编辑 config.mk,内容如下:
#config.mk START # 为 Flymaple 选择 maple_RET6 BOARD = maple_RET6 # HAL_BOARD 决定默认 HAL 目标。HAL_BOARD ?= HAL_BOARD_FLYMAPLE # 用于与 Flymaple 通信的通信端口 PORT = /dev/ttyACM0 # 必须提供 libmaple 库目录的路径:LIBMAPLE_PATH = $(HOME)/libmaple # 此外,ARM 编译器工具必须位于当前 PATH 中:# export PATH=$PATH:~/libmaple/arm/bin #config.mk END
现在为漫游车建立 APM:
CD 无人车UGV
生产 蝇螨
生产 上传
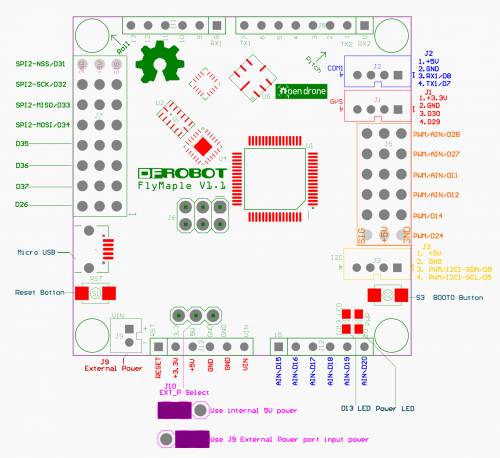
有关如何在 Flymaple 上为越野车型漫游车接线和配置 APM 的文档,请参阅以下网址: