存档:使用 NSH 连接 Pixhawk¶
本文将介绍如何使用 坚果壳 (NSH) 使用串行或远程连接。
概述¶
Pixhawk 运行 NuttX 实时操作系统,其中包括 NuttX Shell 终端 "NSH"。它允许运行一些Unix风格的命令,包括 "top "和 "ls"。
NSH 对于诊断低级问题非常有用。您可以用它做的事情包括
使用
敷衍指挥部显示 px4io 状态信息
诊断 microSD 错误
诊断传感器故障
协助调试新驱动程序
使用调试电缆和串行 5 运行 NSH¶
要在 Copter 或 Plane 运行时使用 NSH,可以使用串口 4/5 进行连接。为此,您需要一个 FTDI 3.3V 电缆 然后修改一个 DF13 6 位置电缆 以便与 FTDI 电缆连接。
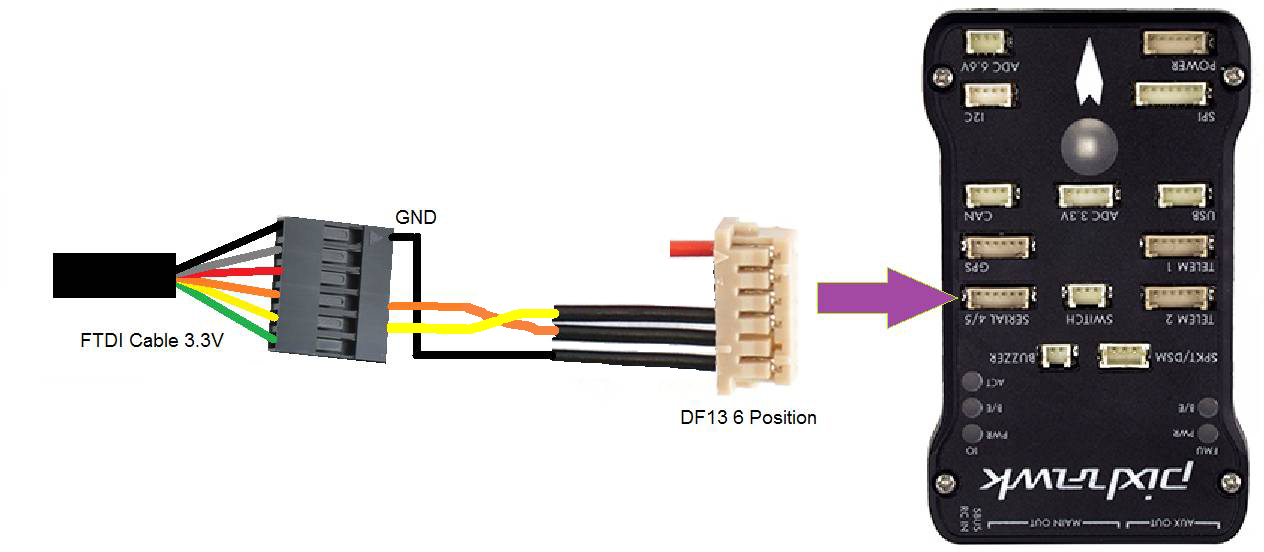
然后,您就可以将 FTDI 电缆插入计算机,并与任何串行程序(包括Mission Planner地面站的终端屏幕)连接。确保选择 FTDI 电缆的 COM 端口,并将波特率设为 57600。出现 "nsh> "提示时需要按回车键。

通过 MAVLink 实现远程 NSH¶
ArduPilot 还支持通过 USB、遥测或 WiFi 链接,通过 MAVLink 远程运行 nsh 命令(这是 SERIAL_CONTROL 协议的扩展,用于通过 MAVLink 控制 GPS 或无线电 UART)。
备注
在编写本报告时,Rover 不支持 MAVLink 上的 NSH(因为它不支持上膛)。
提示
在没有设置串行 5 电缆时,可以用它来进行 nsh 调试。
Mission Planner地面站使用说明:¶
使用 USB 电缆将 Pixhawk 连接到计算机
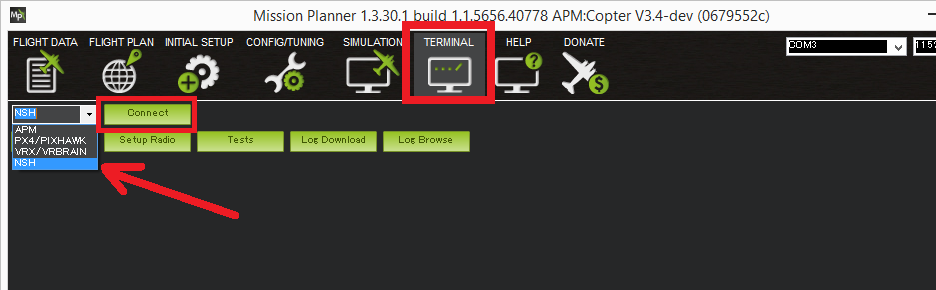
转到 "飞行数据 "屏幕,选择正确的 COM 端口和波特率(一般为 115200),然后按连接按钮
转到终端屏幕,将最左边的下拉菜单设置为 "NSH",然后按连接。
使用 MAVProxy 访问的设置说明:¶
将最新的主控机加载到 Pixhawk 上
获取最新的 MAVProxy
如果使用 Linux,请使用
苏都 核心 安装 mavproxy
如果在 Windows 在此下载.
备注
- 如果您使用的是 Windows 系统,则需要删除任何旧的
中的 MAVProxy 版本。 c:/Program Files (x86)/MAVProxy 因为安装程序无法正确清理旧版本。
开始 MAVProxy 像往常一样
在 MAVProxy 与
模块 负荷 nsh
用以下命令启动 nsh shell
nsh 启动
现在像往常一样运行 nsh 命令。注意 MAVLink 仍在运行,因此 map、 MAPVproxy 控制台、图形等都会在 nsh shell 中不断更新。
提示
对 NSH 命令的空白响应可能表明(飞行)控制器板上的 RAM 内存不足。尽可能释放内存。例如,在主控板上禁用以下地形可节省约 20KB 内存(设置
terrain_enable=0).要恢复正常 MAVProxy 在提示符下单独一行输入一个".
只有在系统撤膛后才能启动外壳。一旦 shell 启动,您就可以上膛了。
警告
理论上,您可以一边执行 nsh 命令一边飞行,但我们不建议您这样做。
这也可以通过 3DR 无线电链路运行,当然输出速度会比 USB 连接慢。