归档:使用 Arduino 在 Windows 上为 APM2.x 构建 ArduPilot¶
警告
存档文章
ArduPilot 不再支持 Arduino 或 AVR。
本文介绍如何使用 Arduino 工具链在 Windows 上为 APM2.x 目标构建 ArduPilot。
提示
警告
Copter 3.3 固件(及更高版本)和 Plane 3.4.0 之后的构建版不再适用于 APM 板。在撰写本文时,Plane、Rover 和 AntennaTracker 版本仍可安装,但您已无法从主分支构建 APM2.x(您需要从支持的发布分支构建)。
可在 APM 2.x 上构建的最后一个 Copter 固件 可从此处下载.
除上述限制外,本文还包括
从 Copter 3.1 版到 3.2.1 版
从 Plane 2.76 版到 3.4.0 版
仅限 APM 2.0、2.5 和 2.6
安装 Git-SCM¶
下载并运行安装文件: https://git-scm.com/download/win
在安装过程中,请按照下面的截图进行选择。

在 欢迎屏幕 然后在 许可证屏幕 点击 下一页 按钮
在 选择组件屏幕 点击 下一页 按钮,然后单击 完成 按钮
点击 下一页 中的 替换使用中的文件屏幕然后等待 Git 加载完毕
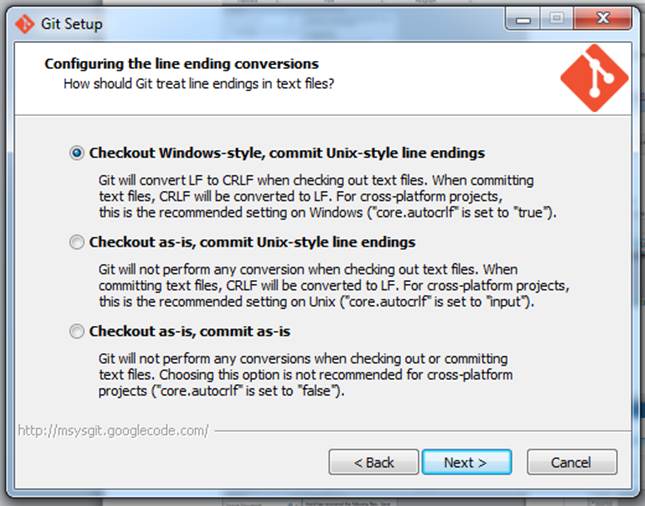
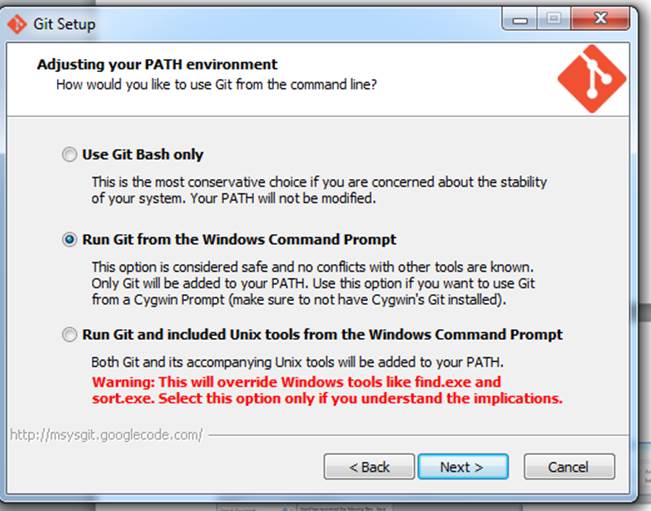
选择 结账窗口 项目和 下一页 按钮,然后选择 从 Windows 运行 Git 项目和 下一页 按钮。
下载源¶
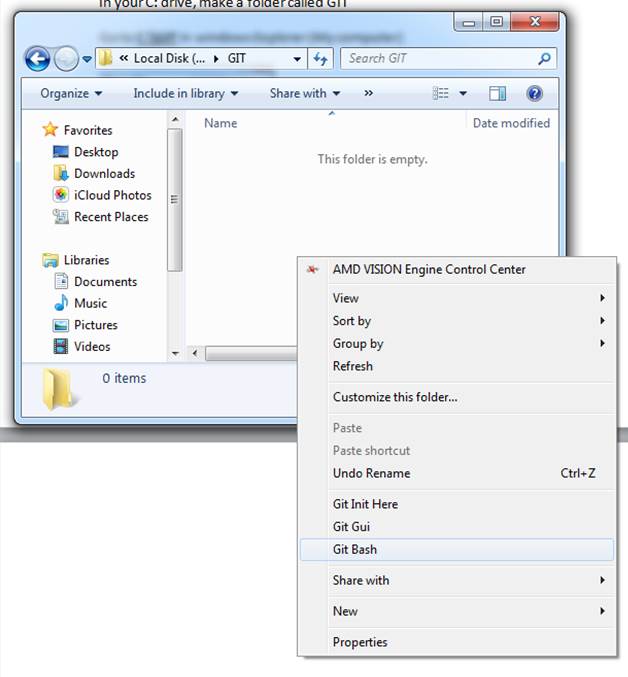
在 C: 驱动器中创建一个名为 GIT (C:\GIT 在我的电脑上)。导航至 Windows 资源管理器文件夹
右键点击文件夹中的任意位置,然后点击 git bash
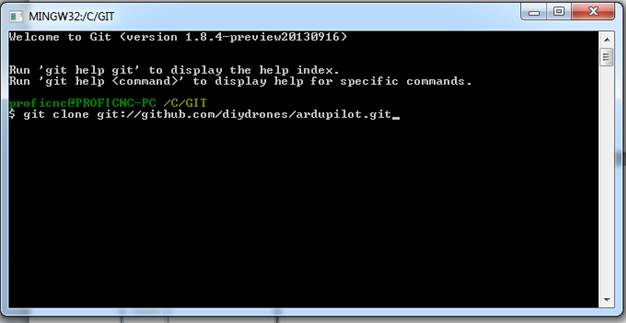
屏幕将显示

在该屏幕中键入
git 复制 --递归-子模块 git://github.网/ArduPilot/ardupilot.git
完成后应该是这样的....
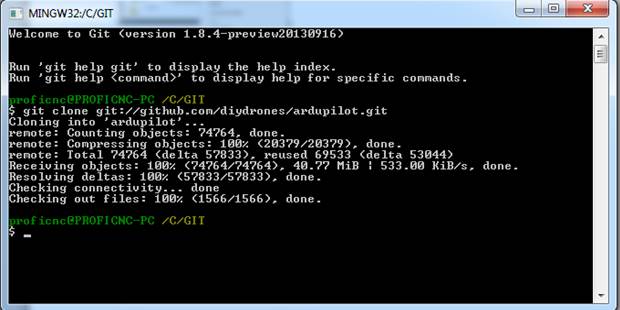
源代码需要更多的初始化。像这样初始化引用的依赖关系:
CD ardupilot git 子模组 更新 --启动 --递归
将 MHV_AVR_Tools 安装到默认位置¶
下载并安装 MHV_AVR 工具: https://firmware.ardupilot.org/Tools/Arduino/MHV_AVR_Tools_20121007.exe
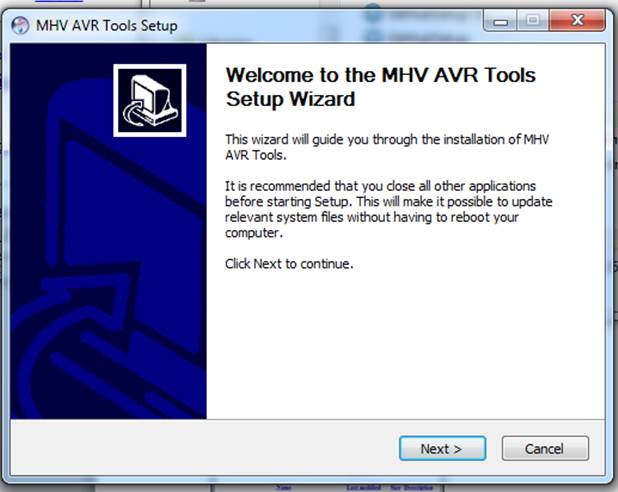
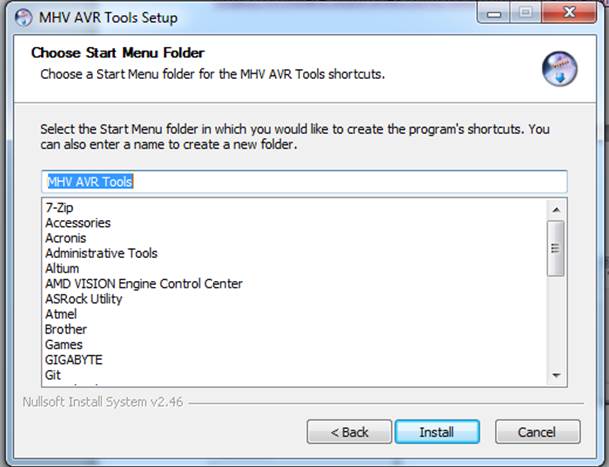
选择 下一页 按钮,然后选择 安装 按钮,用于 MHV AVR 工具
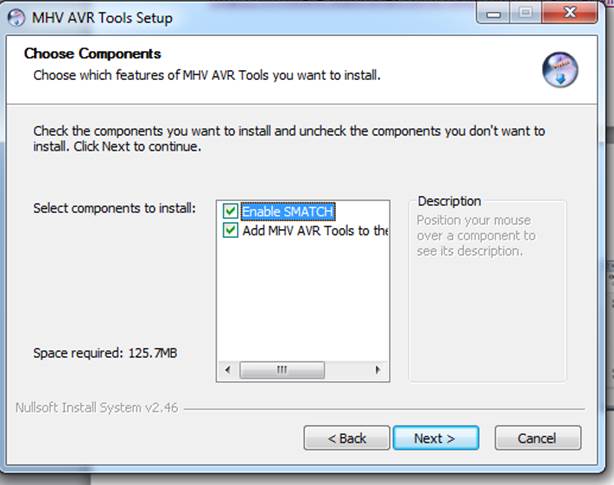
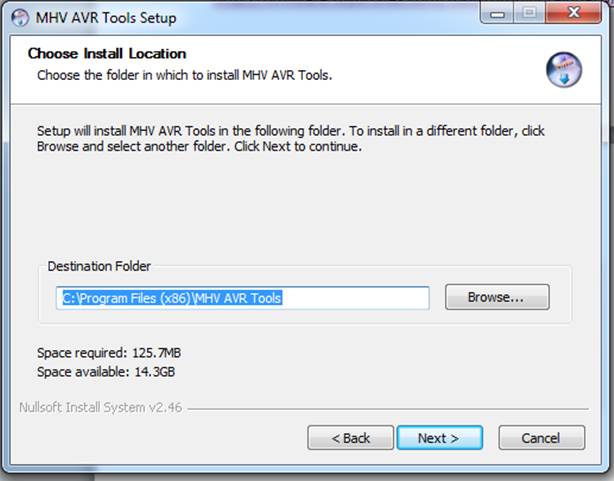
在 "选择 "中勾选两个项目 组件屏幕 并选择 下一页 然后选择 下一页 再次安装到默认位置
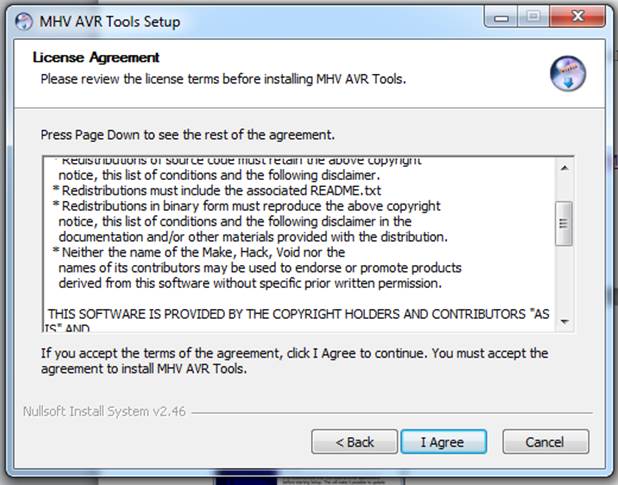
选择 我同意 上的 许可协议屏幕.
安装 ArduPilot-Arduino¶
下载并解压 ArduPilot Arduino 软件包: https://firmware.ardupilot.org/Tools/Arduino/ArduPilot-Arduino-1.0.3-gcc-4.8.2-windows.zip
可以直接解压缩到 C: 驱动器或 C:\Program Files\
备注
这是一个特殊的 ArduPilot Arduino 软件包,其中包含 gcc 4.8.2
配置 Arduino¶
转到 Arduino 文件夹
双击 Arduino 图标

打开 Arduino 后,进入文件菜单
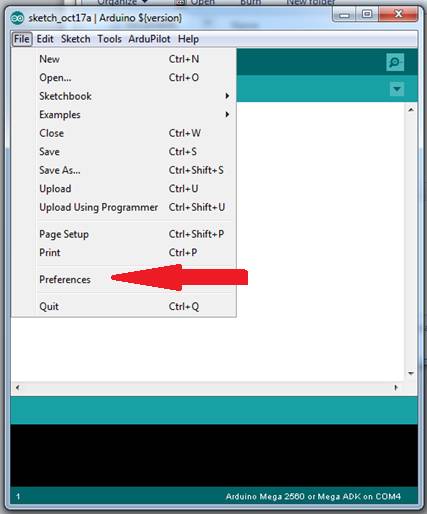
选择偏好
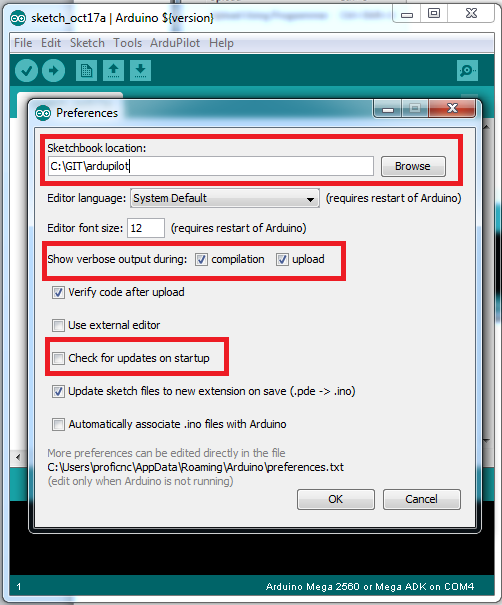
将 Sketchbook 位置设置为 GIT 文件夹中的 ArduPilot 目录。
为编译和上传设置 "冗长 "选项
请勿在启动时检查更新......(请记住,这是专门用于 ArduPilot 的特殊版本。)
点击 好的 并关闭 Arduino
将 APM 连接到 USB¶
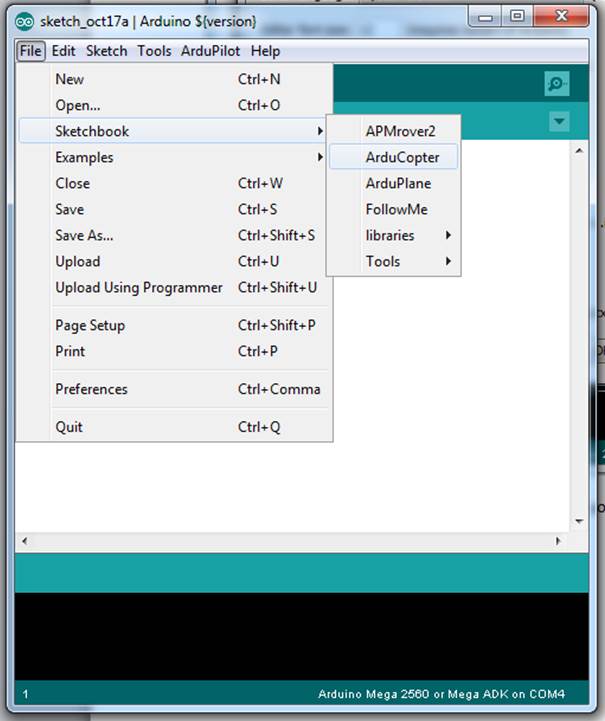
重新打开 ArduPilot,在 "文件 "选项卡下单击 "sketchbook",然后单击要加载到 APM2.x 上的程序(本例中我们将使用 Copter,但其他程序也使用相同的方法)。
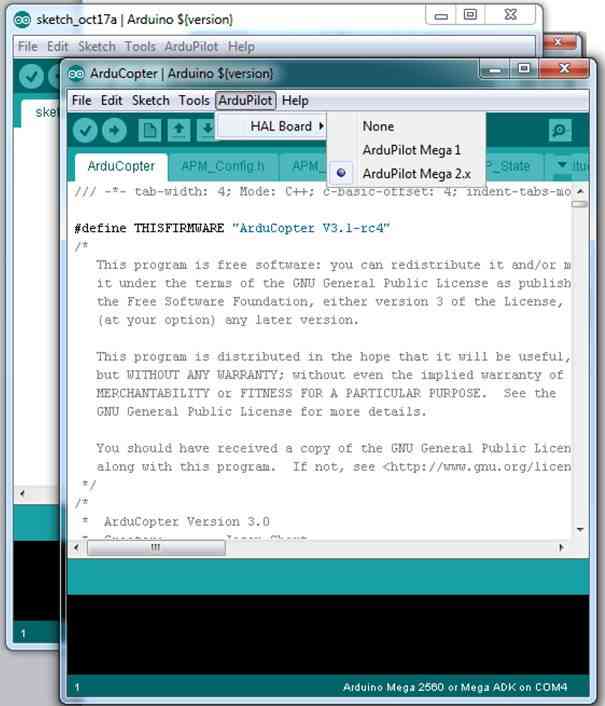
加载完成后,点击 ArduPilot 选项卡,从 HAL 选项中选择 ArduPilot mega 2.x。
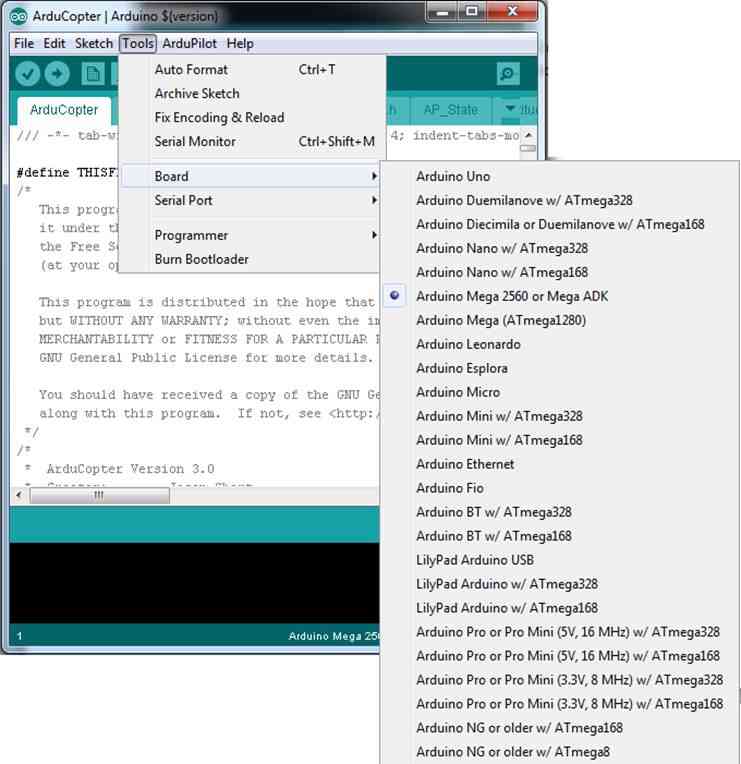
然后点击 "工具 "选项卡,从 "电路板 "选项卡中选择 "Arduino Mega 2560 或 Mega ADK"。
下一步选择 工具 选项卡,并将 "串行端口 "设置为 APM 所连接的端口。
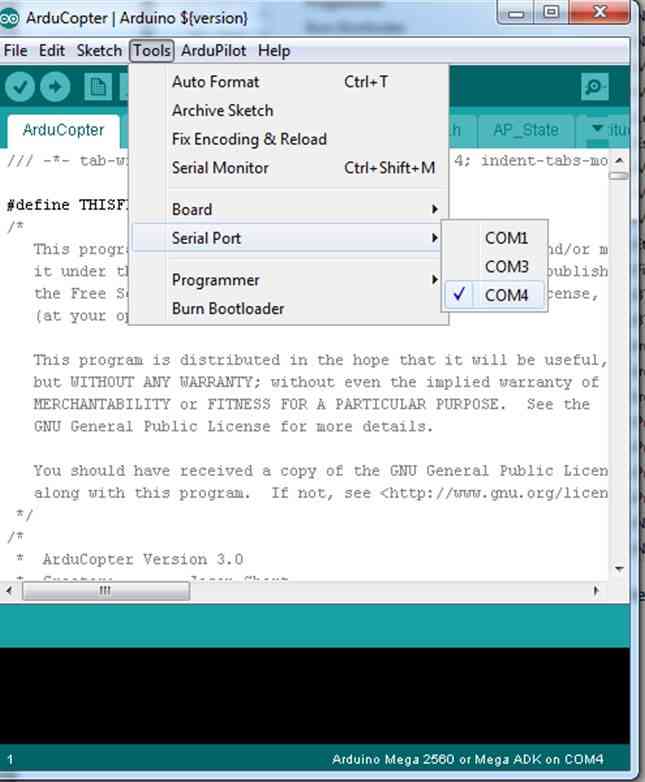
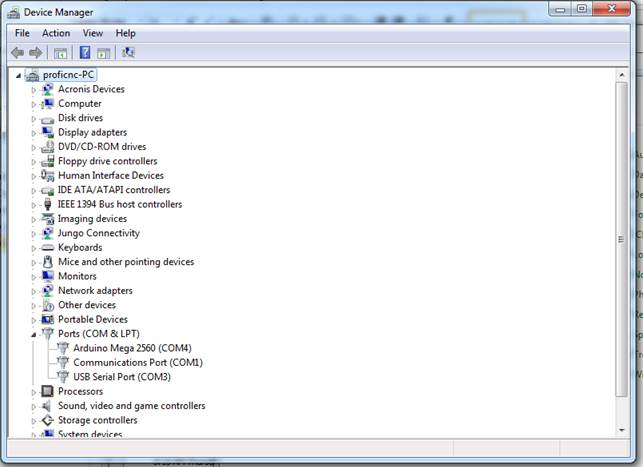
我的情况是 COM4,但请在设备管理器/端口下查看您的系统。
配置旋翼飞行器¶
点击 APM_Config.h 文件选项卡。
设置框架类型(例如
#define 框架配置 HEXA_FRAME),以便为您的画框获取正确的图像在此文件中启用或禁用您希望的功能。
例如,如果您想在编译时禁用自动调整功能,只需取消对该行的注释
//# 禁用自动调整功能 // 禁用自动调整功能以节省 7k 闪存
要禁用默认启用的自动调整功能,可将其更改为
# 禁用自动调整功能 // 禁用自动调整功能以节省 7k 闪存已注释的选项是非默认选项,只需取消注释即可使用。
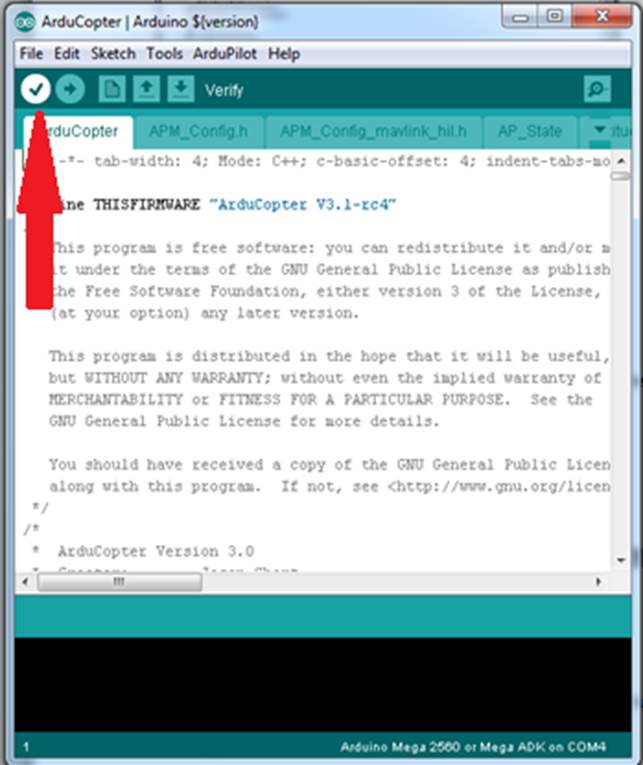
保存该文件并选择文件 Copter。
至此,您就可以开始编译了。
第一次尝试,我会选择核查。
上传至 ArduPilot¶
如图所示,如果一切正常,则上传至(飞行)控制器:
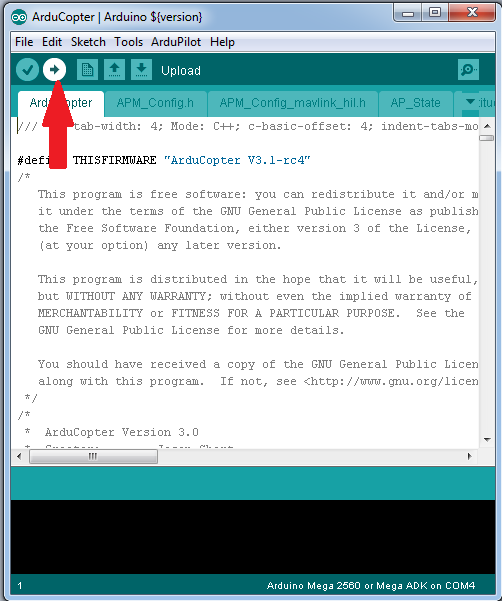
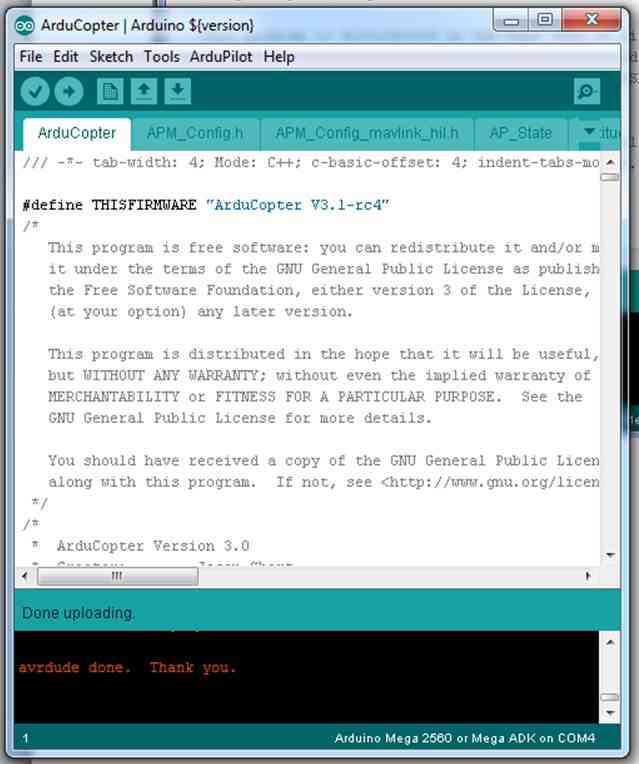
这可能需要一段时间...
最后您会看到如下所示的信息。
像往常一样使用规划器配置 ArduPilot。
警告
您刚刚编译的代码在配置中未经测试。请仅用于测试。如果您没有信心,请使用Mission Planner地面站上传预编译代码。
更新代码¶
请确保您电脑上的代码版本为最新版本,使用 git 将代码更新为最新代码。