已归档:在 Windows 上使用 Eclipse 为 APM2.x 构建 ArduPilot¶
警告
本主题已归档,因为 APM2.x 不再是受支持的(飞行)控制器(自 AC3.2.1 起)。如果尝试将 Eclipse 用于 Pixhawk 或其他(飞行)控制器,这些信息可能仍然适用。
本文介绍了如何使用 Eclipse IDE 在 Windows 上为 APM2.x 构建 ArduPilot。
备注
这些说明介绍了如何使用 日蚀月神 从 PX4 工具链 以构建 APM2.x 目标。它们已通过构建 ArduCopter-3.2.1 Windows 10 上的分支。
警告
Copter 3.3 固件(及更高版本)和 Plane 3.4.0 之后的构建版不再适合 APM2.x 板。在撰写本报告时,Plane、Rover 和 AntennaTracker 版本仍可安装,但您已无法从主分支构建 APM2.x(您需要从受支持的发布分支构建)。
可在 APM 2.x 上构建的最后一个 Copter 固件 可从此处下载.
先决条件¶
请按照 使用 Make 在 Windows 上为 APM2.x 构建 ArduPilot.这些说明了如何下载源代码、安装所需工具(包括 Eclipse)以及如何设置环境。
提示
确保更新 config.mk 并标明 ARDUINO 工具的位置。
启动 Eclipse¶
使用 PX4 Eclipse 安装的链接 PX4 工具链.该链接可通过以下任一方式访问
Windows 开始菜单 (开始 | 所有程序 | PX4 工具链 | PX4 Eclipse),或
您可以直接运行文件 C:\px4\toolchain\msys\1.0\px4_eclipse.bat
创建项目¶
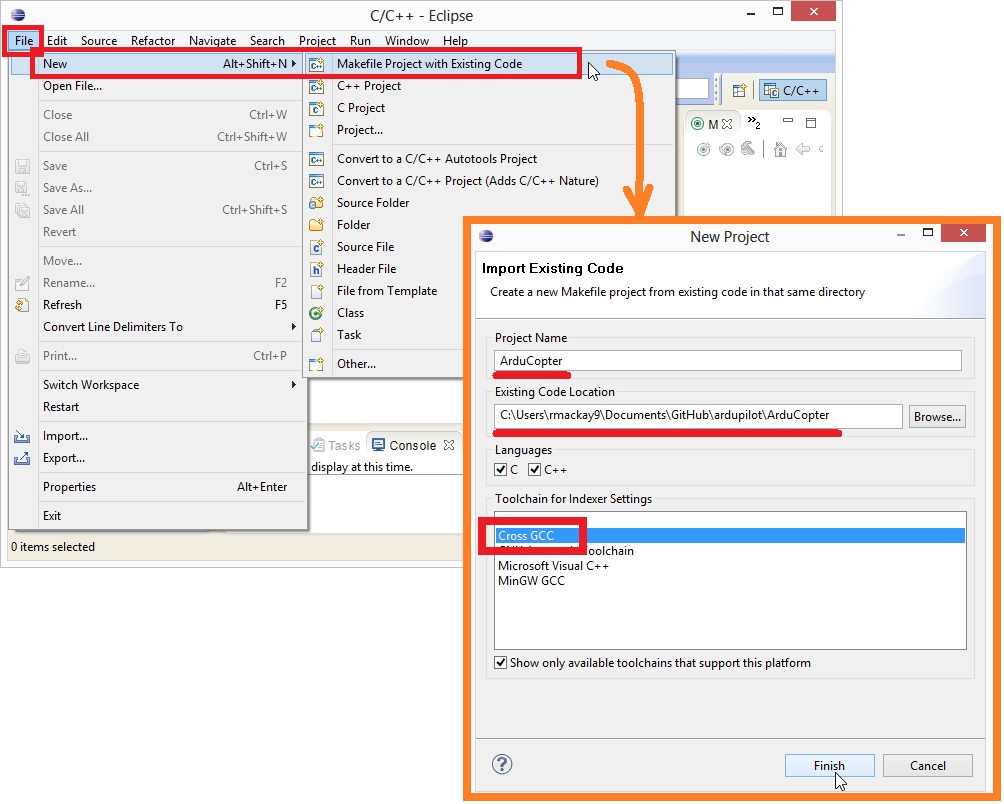
创建项目:
选择 文件 | 新建 | 使用现有代码创建项目
填写项目名称并设置 现有代码位置 到 Copter 目录
将工具链设置为 跨海湾合作委员会"然后按 完成
用空格代替制表符¶
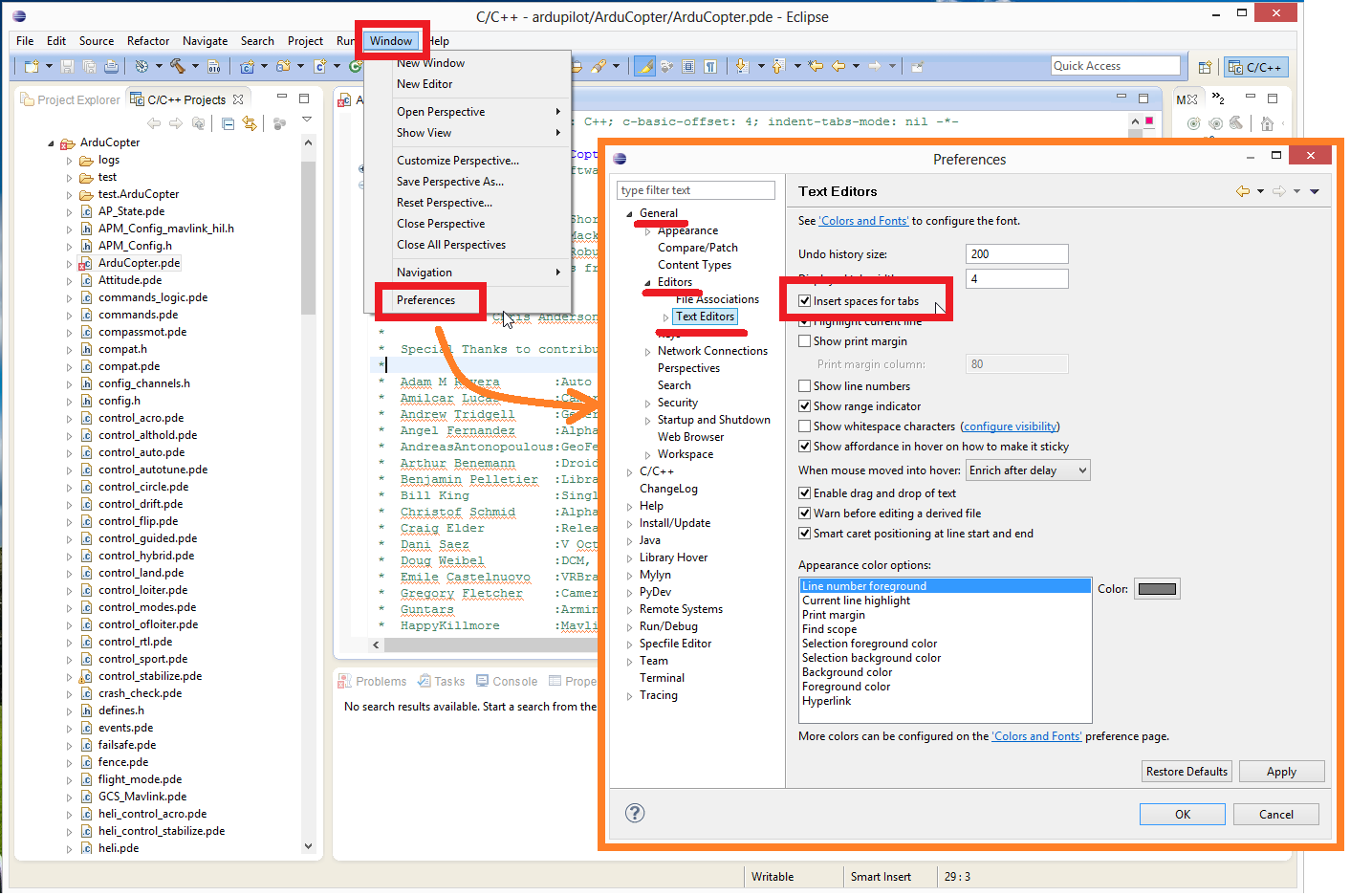
默认情况下,Copter、Plane 和 Rover 使用空格代替制表符。在 Eclipse 中,可以通过更改两个设置将其设置为默认值:
选择 窗口 | 首选项 | 常规 | 编辑器 | 文本编辑器 | 为制表符插入空格.
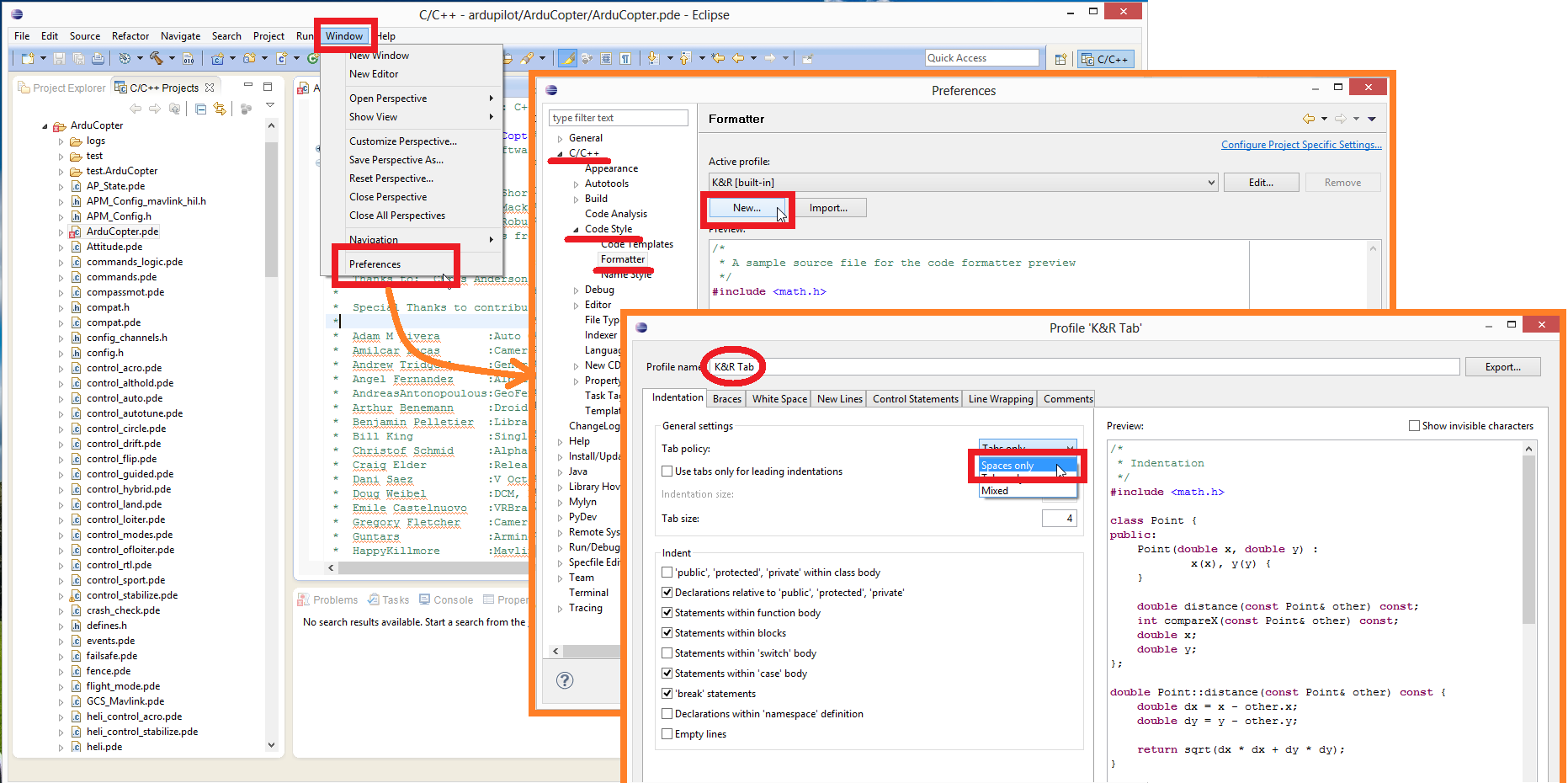
选择 Windows | 首选项 | C/C++ | 代码风格 | 格式化器 并创建一个新的配置文件(即 "K&R Tab"),将 "缩进 "设置为 "仅空格"。
指定构建位置¶
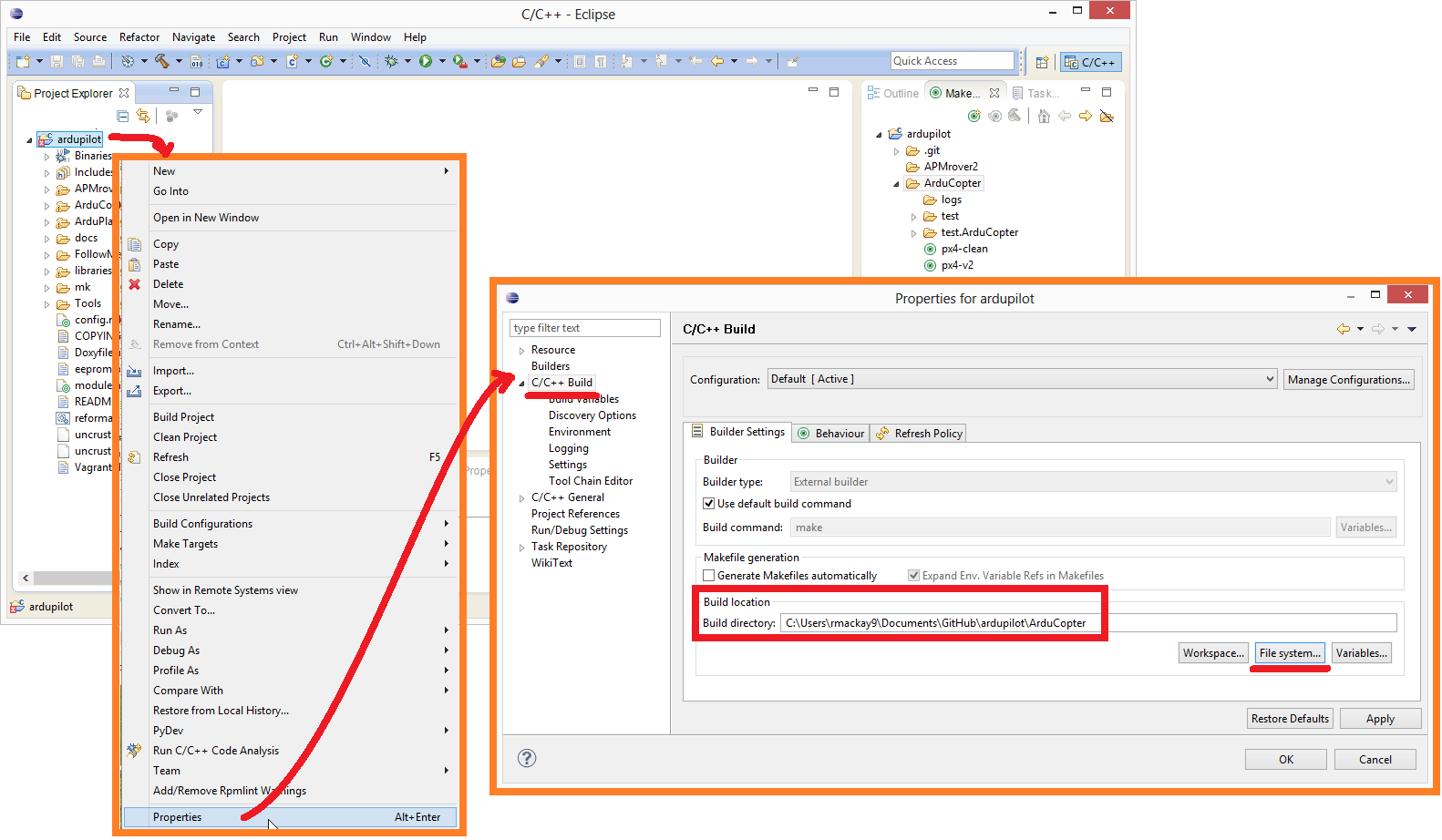
在 项目探索者 用鼠标右键单击 ardupilot 文件夹,然后选择 属性.然后在 C/C++ Build 下将 "Build location(构建位置)"设置为 Copter 或 Plane 目录,如下图所示。
指定制作目标¶
在右侧的制作窗口中,指定一个 apm2 制作如图所示的目标:
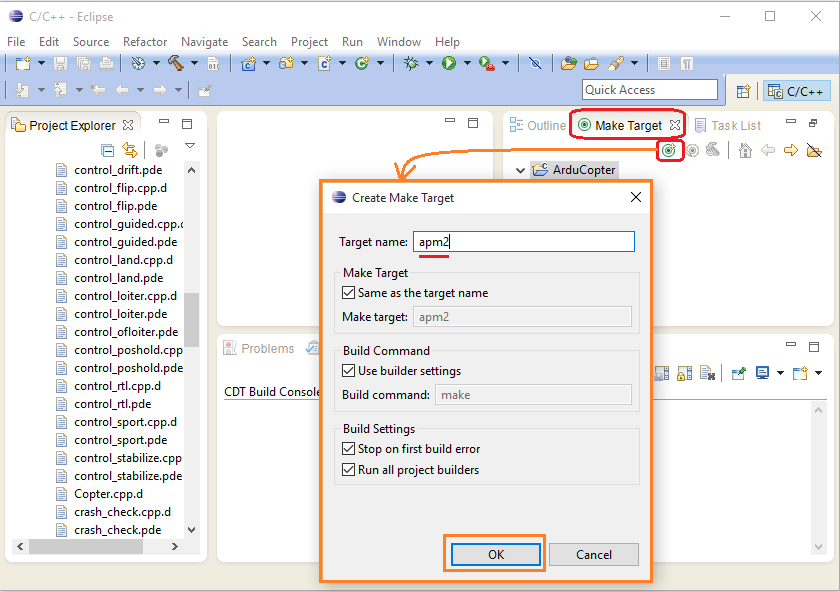
Eclipse:设置 apm2 maketarget¶
从 Eclipse 构建¶
按下绿色圆圈+锤子图标,即可构建制造目标。构建进度将显示在控制台窗口中。
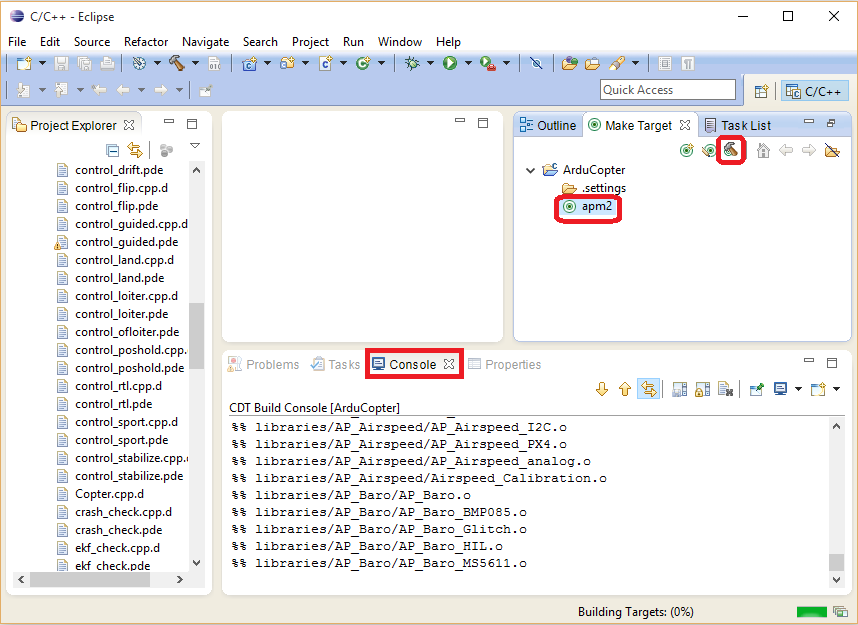
Eclipse:构建 APM2¶
固件将在用户临时目录的子文件夹中创建。例如 ArduCopter.hex 于 C:\Users\**YourUserNameHere\AppData\Local\Temp\ArduCopter.build**.