Echologger ECT400 回声测深仪¶
"这款" EchoLogger ECT400 是一种回声测深仪(又称水下声纳),测深范围 100 米,波束宽度 5 度,更新频率 1 赫兹至 10 赫兹。更多详情请见 数据表

图片来源:echologger.com
备注
Rover-3.4 添加了对该传感器的支持。
推荐硬件¶
ECT400 可在 向 echologger.com 发送电子邮件
USB 至 RS232 转换器 可通过电脑测试和配置传感器
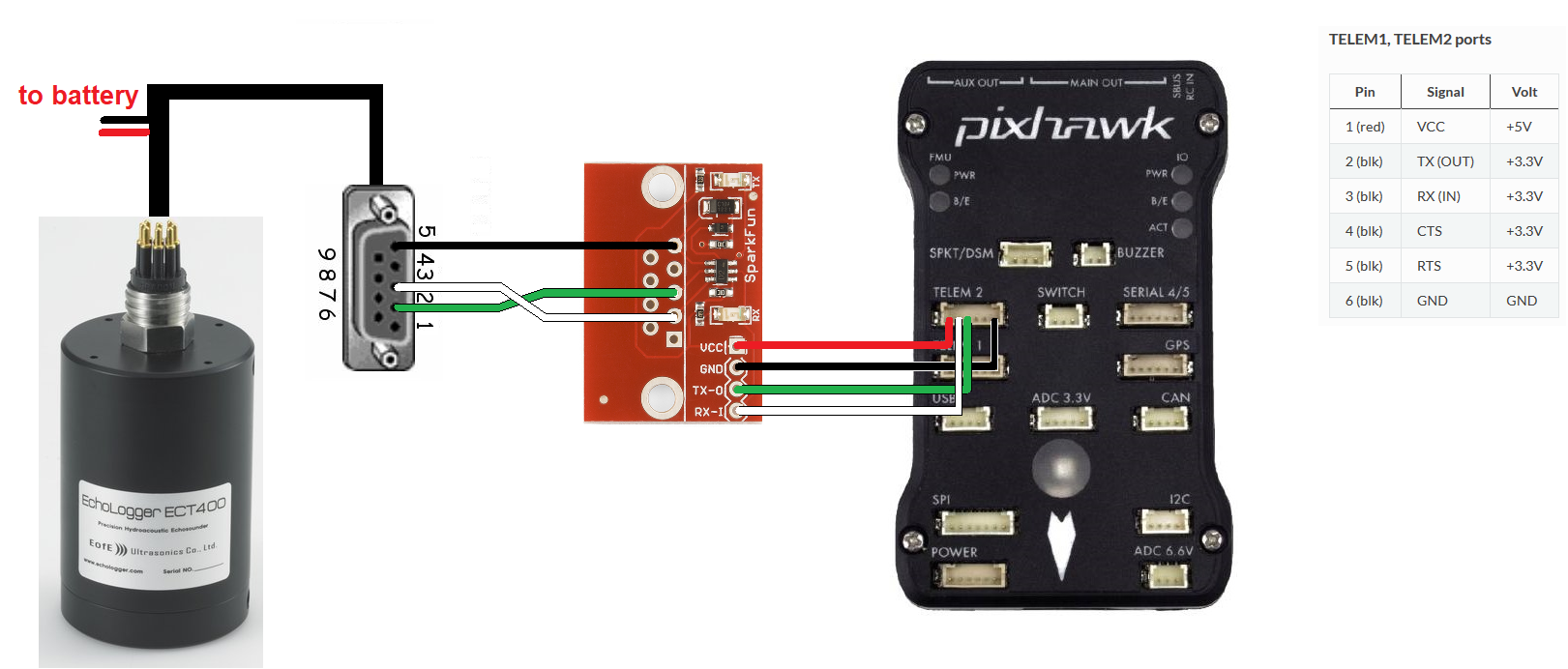
连接和配置¶
ECT400 采用 NMEA 协议,通过串行方式以 115200 波特提供距离测量。
传感器可以连接到(飞行)控制器上任何可用的串行/uart 端口。在下图中,第一个传感器连接到 SERIAL2。
如果使用 SERIAL2,则应设置以下参数:
serial2_protocol = 9(激光雷达)
SERIAL2_BAUD = 115(115200 波特)
然后应设置以下测距仪相关参数:
RNGFND1_TYPE = 17(NMEA)
RNGFND1_MIN_CM = 13
RNGFND1_MAX_CM = 10000(即 100 米)。 这是测距仪能够可靠读取的距离(厘米)。
RNGFND1_ORIENT = 25(即向下),如果安装在船上
配置传感器¶
默认情况下,传感器的深度采样频率仅为 1 赫兹,最大深度为 10 米。
使用 USB 至 RS232 转换器 使用终端程序(如 油灰 (连接类型为 "串行",速度为 "115200",串行线路为相应的 COM 端口)。
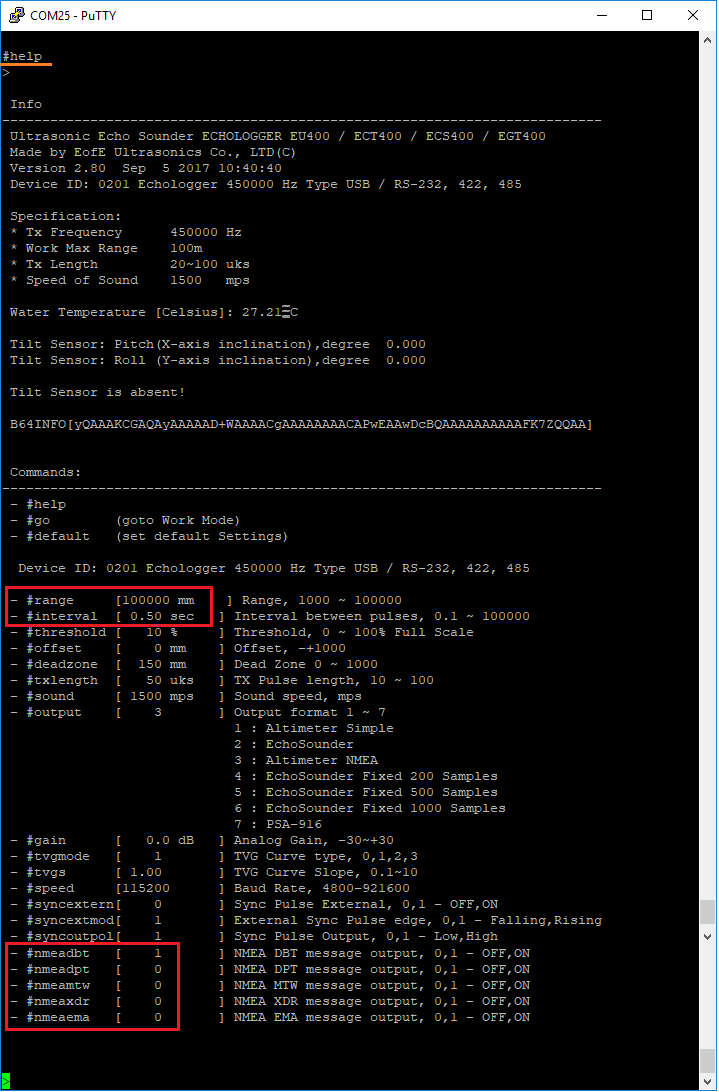
如果连接正确,控制台上应显示 NMEA 数据。类型:
#help (显示帮助菜单)
#range 100000(将范围设置为 100 米)
#interval 0.5(将更新率设置为 2 赫兹)
#nmeadpt 0(禁用 dpt 信息)
#nmeamtw 0(禁用 mtw 消息)
#nmeaxdr 0(禁用 xdr 信息)
#nmeaema 0(禁用 ema 信息
有关 NMEA 报文内容的更多信息,请参见 这里
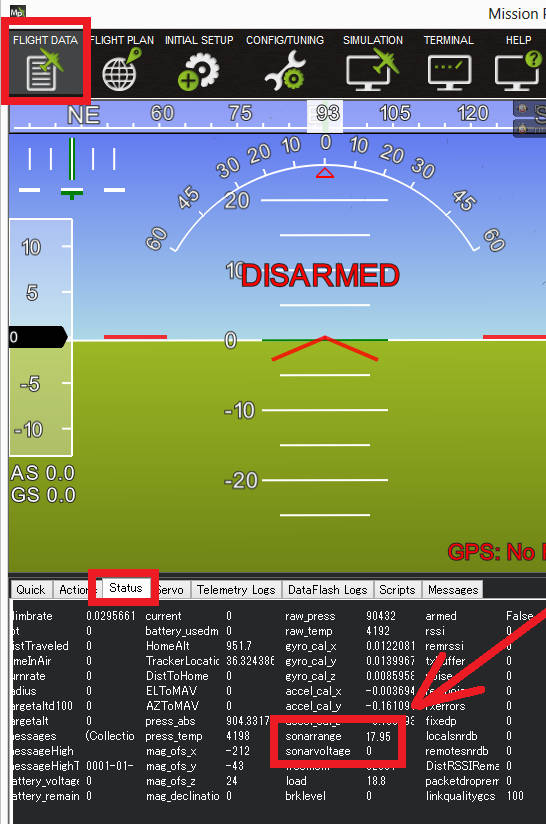
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查看 "sonarrange"(声纳范围)。