DJI RS2 和 RS3-Pro 云台¶

ArduPilot 4.4(及更高版本)支持 大疆创新 RS2 和 大疆创新 RS3-Pro 手持云台使用 Lua 脚本.该驱动程序依赖于支持 "DJI R SDK "协议的云台,据我们所知,只有这两个云台支持该协议。不支持其他云台,包括非常类似的 RSC2 和 RS3。
本页中的一些图片来自 DJI SDK 协议和用户界面说明。
购买什么¶
大疆创新 RS2 或 大疆创新 RS3-Pro 万向
DJI R 聚焦轮 以便连接(飞行)控制器
连接和配置¶
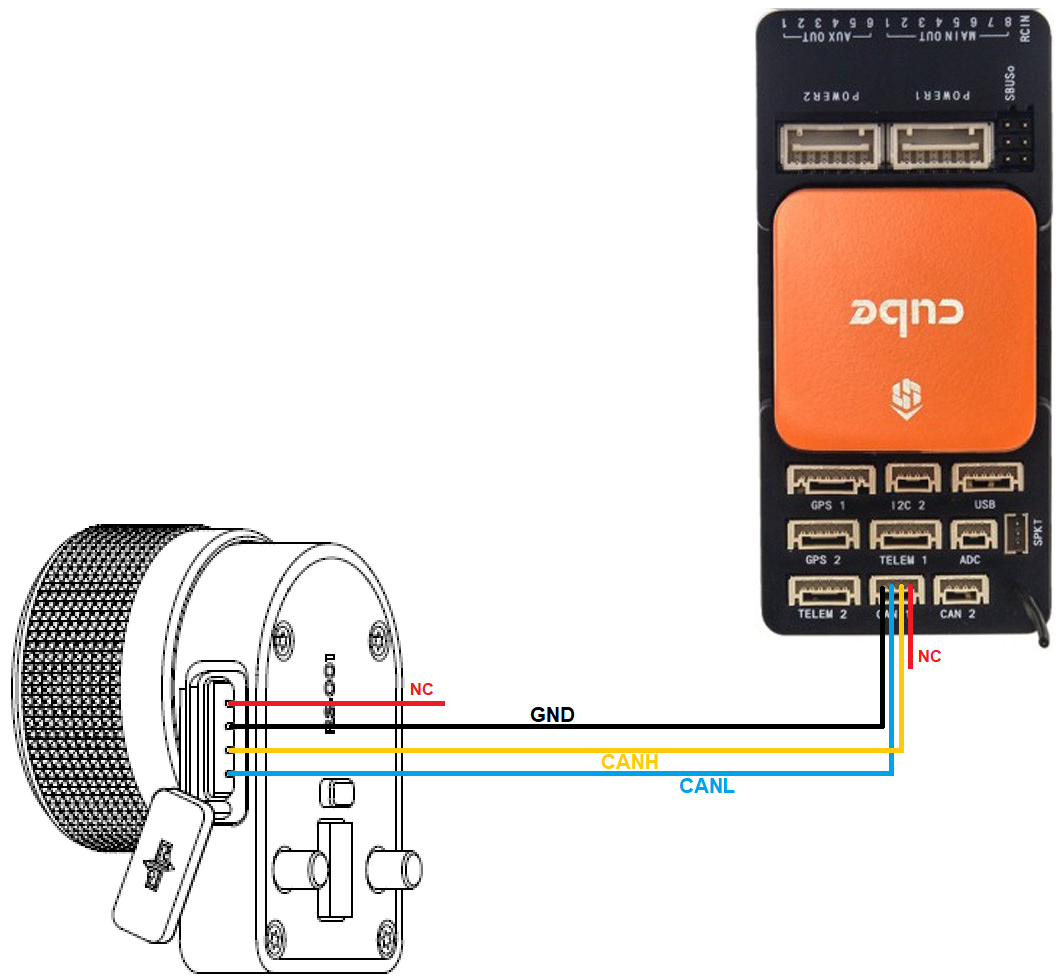
将(飞行)控制器的 CAN1 或 CAN2 端口连接到 Focus 轮,如下图所示
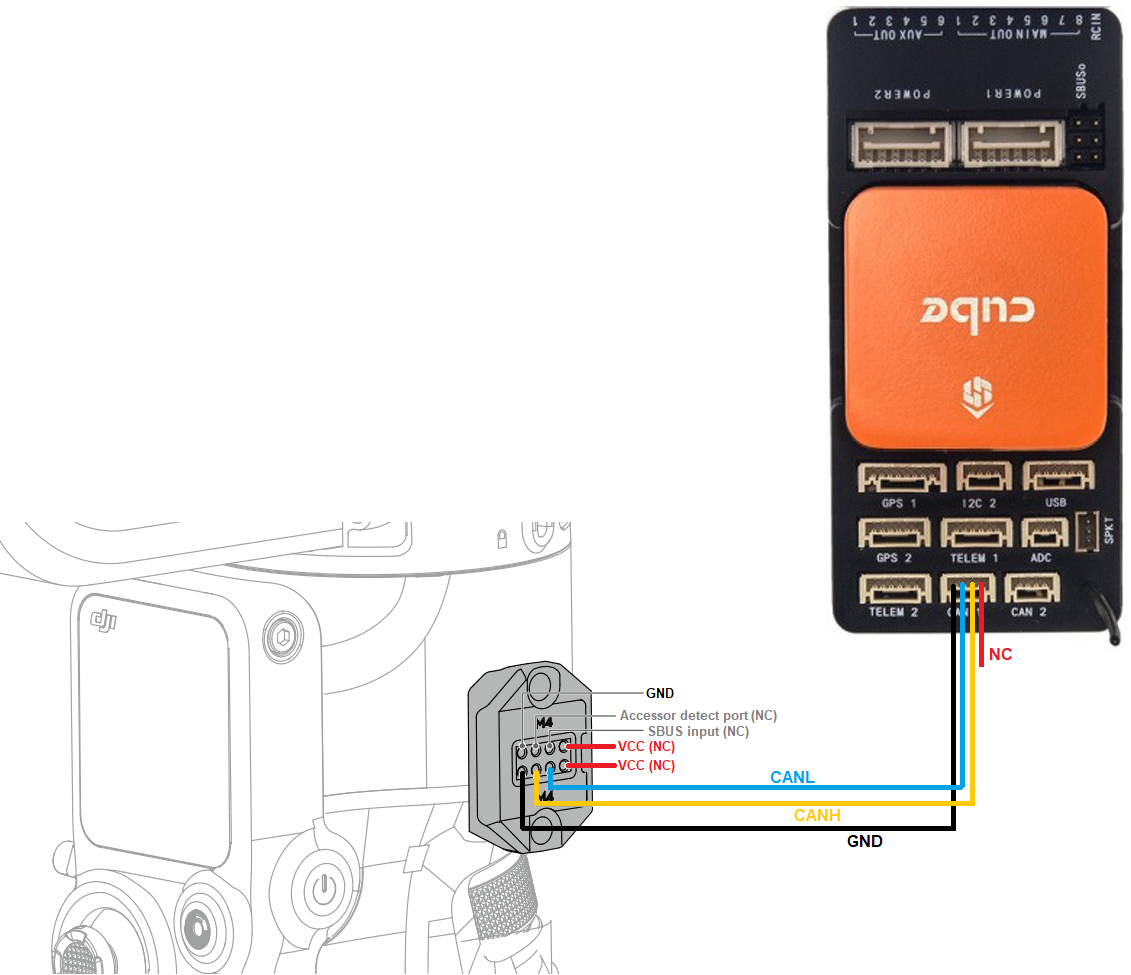
另外,也可以不使用 Focus 轮进行连接。请注意,下图显示的是万向节右侧的端口。可以使用右侧端口,但引脚位置要旋转 180 度。
用地面站连接(飞行)控制器并执行以下操作
如果使用 CAN1,则设置 can_d1_protocol = 10(脚本)、 CAN_P1_DRIVER = 1(第一驱动程序)
如果使用 CAN2,则设置 can_d2_protocol = 10(脚本)、 CAN_P2_DRIVER = 2(第二驾驶员)
设置 SCR_ENABLE = 1 启用脚本
设置 SCR_HEAP_SIZE = 120000(或更高)
设置 MNT1_TYPE = 9(脚本)启用挂载/云台脚本驱动程序
重启(飞行)控制器
下载 mount-djirs2-driver.lua (从这里),并将其复制到(飞行)控制器 SD 卡的 APM/脚本目录中,然后重启(飞行)控制器
可将 DJIR_DEBUG 设为 1,以每 5 秒钟显示一次解析和错误统计信息。设为 2 可显示万向节角度
请参阅本章的 "使用遥控发射机控制 "部分。 本页 了解通过遥控发射机控制云台(又称 "遥控瞄准")所需参数更改的详情
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情
警告
偏航率控制始终是 "跟随 "模式(又称 "地球帧"),这意味着如果用户从遥控器控制云台的偏航旋转率(例如 MNT1_RC_RATE >0),云台将在 "锁定 "模式下旋转(例如 "地面框架",例如不会随飞行器旋转)。解决方法是始终使用偏航角控制(例如 MNT1_RC_RATE = 0)或将悬置切换到 "中性 "状态,以便用户随时调整悬置中心。