SimpleBGC 云台(又名 AlexMos 云台)¶
SimpleBGC 是一款流行的无刷万向节控制器,可使用 MAVLink 或自定义串行协议与 ArduPilot(Copter、Plane 和 Rover)通信。有关该云台功能的更多详情,请访问 basecamelectronics.com
更多详情可参见 软件用户手册.
购买地点¶
SimpleBGC 控制器及配套的 2 轴和 3 轴万向节可从以下网站购买 basecamelectronics.com 和许多其他零售商。
将云台连接至(飞行)控制器¶
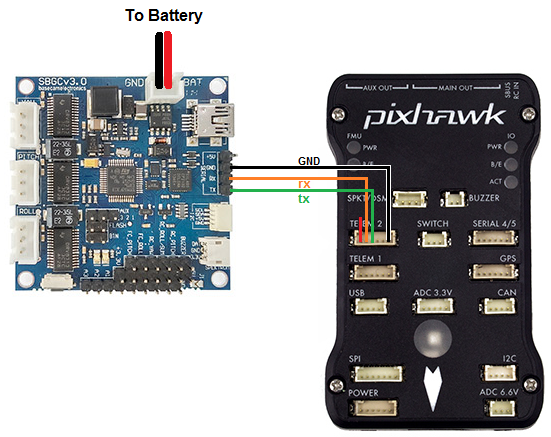
虽然可以使用 PWM 连接 SimpleBGC,但我们建议使用串行接口连接到(飞行)控制器的一个串行/遥测端口,如上图所示的 Telem2。
使用自定义串行协议时的配置¶
如上图所示,如果使用连接到串行 2 的第一个支架,请在地面控制站中设置以下参数:
MNT1_TYPE 至 3("AlexMos-串行)
serial2_protocol 至 7("AlexMos 万向节串行接口)
如果无法连接,您可以设置以下参数,但通常不需要这样做:
SERIAL2_BAUD 至 115(表示使用 115200 的串行波特率)
brd_ser2_rtscts 设为 0 以禁用 Telem2 上的流量控制(如果连接串行 1,则使用 BRD_SER1_RSCTS,串行 4/5 从不使用流量控制)。
云台的最大倾斜角度可通过这些参数设置:
MNT1_ROLL_MIN, MNT1_ROLL_MAX 和 30,将滚动角度限制为每个方向 30 度
MNT1_PITCH_MIN, MNT1_PITCH_MAX 到 -90 和 0,以限制万向节指向直下(-90 度)和直前(0 度)。
用于 360 度偏航设置的三轴万向节 MNT1_YAW_MIN, MNT1_YAW_MAX 分别为-180 和 180
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情
使用 MAVLink 协议时的配置¶
有关 MAVLink 设置的制造商说明,请参阅《MAVLink》第 97 页。 软件用户手册.
要使用云台图形用户界面和 MAVlink 协议,云台必须运行 2.60 或更高版本的固件。
下面的说明介绍了如何为组件接线:
如上图所示连接(飞行)控制器,但将 RX 线(橙色)连接至 RC-R,TX 线(绿色)连接至万向节上的 RC-Y 针脚
将接地线(黑色)连接到任何接地引脚。
在此设置中,您必须在图形用户界面中设置以下选项:
在 RC 选项卡的 "外部 IMU "选项卡上的 "外部 IMU 配置 "字段中,通过设置 "RC_ROLL 引脚模式"="串行端口(串行 API 等)"激活 RC_SERIAL
选择型号:"MavLink FC 频道 1
连接:禁用 在同一标签页的 "MavLink 连接 "字段中为通道 1 设置(通道 2 禁用)。
串行端口:"RC_serial" - 系统标识/组件标识:1, 154
端口设置:115200, 无奇偶校验
检查选项:发送心跳和查询 RC 数据
MavLink 控制模式:"仅控制 ROLL 和 PITCH 轴" 如果一切设置正确,您应在字段中看到类似以下内容:AHRS:OK(40ms),GPS:OK(106 毫秒),RC:OK,控制:CH1:已收到数据包:257502,丢失:0,解析错误:3 CH2:收到数据包:0,丢失:0,解析错误:0:0.
如果使用连接到串行接口 2 的第一个支架,请在地面控制站中设置以下参数:
MNT1_TYPE 至 4("SToRM32 MAVLink")。
serial2_protocol 至 1("MAVlink1)
SR2_EXTRA1 至 20
SR2_POSITION 至 10
SR2_RC_CHAN 为 20,所有其他 SR2_* 变量均为 0。
如果您想手动控制俯仰角,可以进行设置:
RCx_OPTION至 213。在 SimpleBCG GUI 的 "RC 设置 "选项卡的 "输入配置 "字段中,将 PITCH 设置为 "API_VIRT_CH6"。
警告
如果按照上图所示连接云台,则无法通过 USB 与 PC 上的图形用户界面建立连接,同时也无法与(飞行)控制器连接。出现这种情况是因为 UART1(上图中的 "串行")是 "与板载 USB-UART 转换器并联 "的(有专用 USB 的 "Tiny "板除外)。如果您不小心通过 USB 连接了图形用户界面,又通过 UART1 连接了(飞行)控制器,那么云台闪存上的数据可能会损坏。这可能会导致马达意外运动!具体原因请查看 链接.
测试万向节移动是否正确¶
测试飞行员对俯仰的控制
通电后,当发射机的通道 6 飞行稳定调整旋钮处于最小 PWM 值(可能在 1000 左右)时,云台应指向其俯仰角最小值(即直向下);当飞行稳定调整旋钮处于最大值(可能在 2000 左右)时,相机应指向其最大俯仰角(即直向前)。Mission Planner地面站无线电校准页面可用于检查 Ch6 的当前输入 PWM 值。
测试投资回报率
您必须有 GPS 锁定才能测试 ROI。 ROI 功能可将飞行器和/或摄像机指向目标。上述说明介绍了如何设置 APM/Pixhawk,使其仅控制 Tarot 云台的俯仰角,因此当目标出现时,APM/Pixhawk 可以控制目标的俯仰角。 设定投资回报率 收到命令后,Copter 会尝试转动飞行器的机头指向目标方向,并根据飞行器的距离和高度调整摄像机的俯仰角。您可以通过连接Mission Planner地面站来测试万向节俯仰动作是否正确,然后在飞行数据屏幕的地图上,用鼠标右键单击飞行器前方约 50 米处的一个点(橙色和红色线条表示飞行器的当前航向),选择 将相机对准此处 并输入-50(米)的高度。这将使云台以大约 45 度的角度指向下方。

可通过设置一个 辅助功能开关 到 "缩回安装"(即 RCx_OPTION = 27),然后将开关移到较低位置