FLIR Vue Pro¶
"这款" FLIR Vue Pro 红外热像仪支持 MAVLink,可将位置和姿态信息添加到存储在内置 SD 卡上的每张图像中
警告
FLIR 最新固件(3.3.2 版)中的 Flir Vue Pro MAVLink 接口似乎出现故障,这意味着拍摄的照片不包含载具位置和姿态的 EXIF 数据。

图片来源:flir.com
其中一些说明是根据以下资料编写的 FLIR Vue Pro 用户指南 和 Tuffwing.com
推荐硬件¶
Flir Vue Pro 可直接从以下网站获取 flir.com
Flir 电缆 附件电缆 (用于使用 DF13 连接器的 Pixhawk1)或 Tuffwing.com 的 Flir Vue Pro 触发器和地理标记电缆 (适用于大多数使用 JST 连接器的其他(飞行)控制器)
连接和配置¶
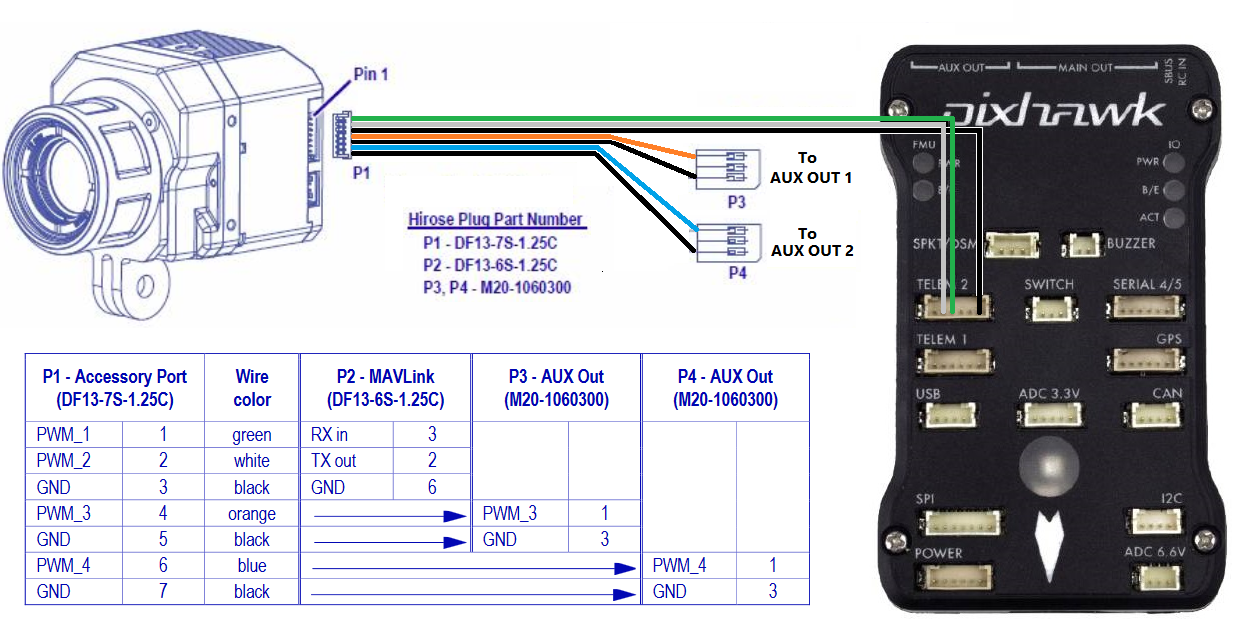
将附件电缆的一端插入相机的 7 针 DF13 连接器(位于微型 USB 端口旁边),然后将另一端的 6 针连接器插入(飞行)控制器的一个遥测端口。本例中使用的是 Telem2。
在(飞行)控制器上设置以下参数(假设使用 Telem2/Serial2):
serial2_protocol = 1(MAVLink 1)
SERIAL2_BAUD = 57(57200 波特)
SR2_POSITION = 5 以 5 赫兹的频率向摄像头发送载具位置信息
为了在执行任务期间或通过发射机的辅助开关触发拍照,请将 "P3"3 针伺服连接器连接到(飞行)控制器的一个伺服输出端。本例中使用的是 AUX OUT 1(又名 SERVO9)。然后设置以下参数(假设使用 Camera1 实例):
CAM1_TYPE = 1(伺服)
CAM1_SERVO_ON = 1900
servo9_function = 10(摄像机触发器)
RC8_OPTION = 9(摄像机触发器)启用发射机开关 8 的触发功能
配置电话¶
如 Tuffwing.com 网站所述在手机上安装 Flir UAS 应用程序 (机器人 或 iPhone),打开相机电源并使用蓝牙从手机连接。为附件端口设置以下选项:
串行协议:MAVLink
串行数据速率57600
通道 1:MAVLink TX
通道 3:记录开始/停止
测试¶
在载具可以获得 GPS 定位的位置启动摄像头和(飞行)控制器。
连接地面站(如Mission Planner地面站),检查飞行器是否出现在地图上
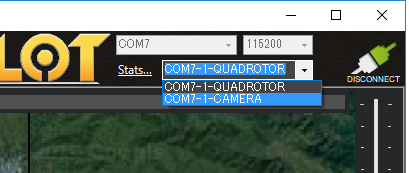
如果(飞行)控制器和摄像机之间的串行连接正常,那么在摄像机接通电源后不久,它就会开始向(飞行)控制器和地面站发送心跳信号,如果使用Mission Planner地面站,则会在右上角的下拉菜单中显示为 "CAMERA"。但选择 "CAMERA "将不起作用,因为摄像机不会对参数请求做出响应。
使用发射机的辅助开关或鼠标右键单击地图并选择 "立即触发相机 "来触发拍照。相机应发出哔哔声
使用 USB 电缆将相机连接到电脑(或取出相机的 SD 卡),检查是否已捕捉到图像
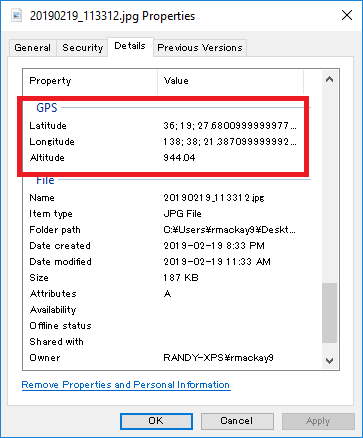
检查文件属性,确保纬度、经度和高度已与图像一起记录下来