STorM32 云台控制器¶
STorM32-BGC 是一款成本相对较低的三轴无刷云台控制器,可使用 MAVLink 或专有串行协议与 ArduPilot(Copter、Plane 和 Rover)通信。
带有 I2C 设置和固件 v0.96 的 SToRM32 云台应使用 SToRM32 串行驱动程序
运行 0.96 版以上固件的 SToRM32 NT 云台应使用 SToRM32 MAVLink 驱动程序
购买地点¶
请参阅 STorM32-BGC 维基页面 了解更多详细信息,包括云台的购买地点。
警告
已发现某些 v1.3x 板会对 433mhz 和 915mhz 频段造成严重的射频干扰。如果使用 433/915mhz 控制或遥测功能,请谨慎使用。
连接云台和(飞行)控制器¶
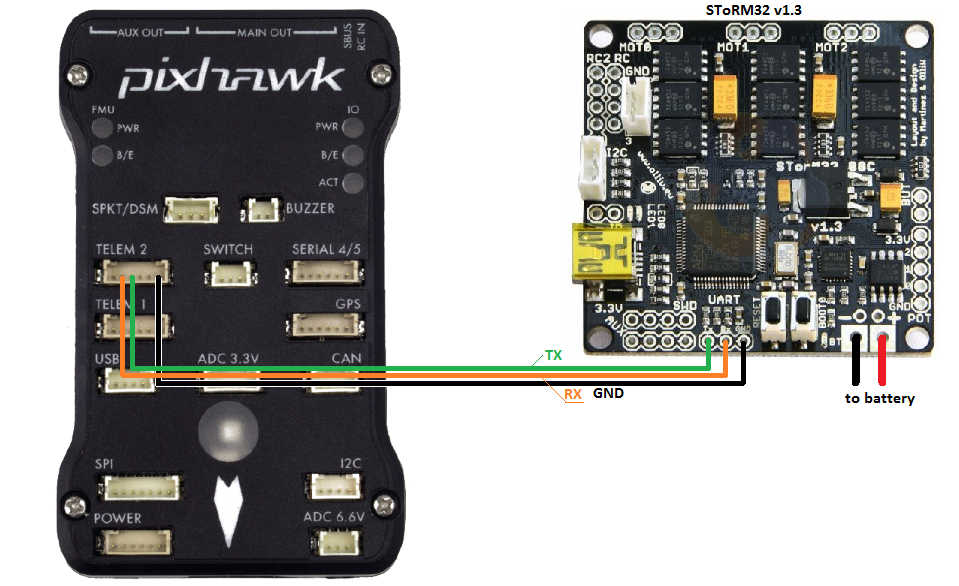
如上图所示,将(飞行)控制器串行端口的 TX、RX 和 GND 引脚之一连接到云台的 UART 端口。不应连接(飞行)控制器串行端口的 VCC、RTS 和 CTS 引脚。
使用 MAVLink 协议时的设置¶
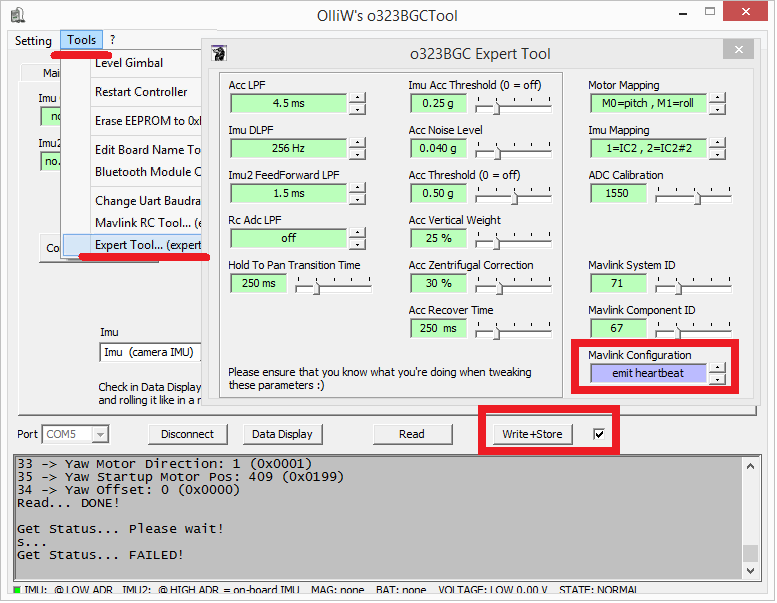
除了常规的万向节配置外 STorM32-BGC 维基百科因此,应通过 OlliW 的 o323BGCTool 的 工具 | 专家工具 屏幕,如下图所示。
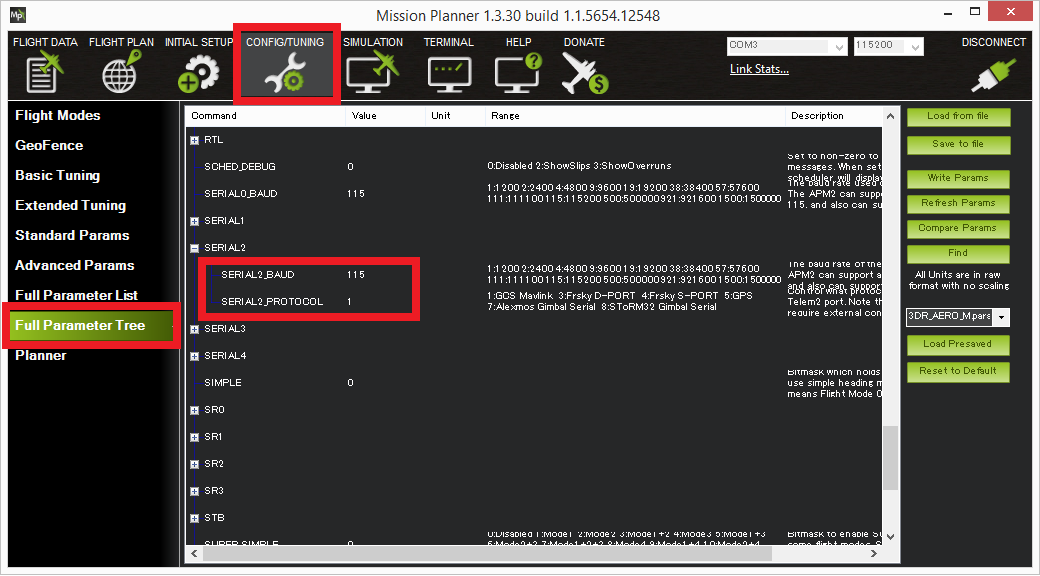
使用地面站(如 Mission Planner)设置以下参数。这些设置假定使用的是 Autopilot 的串口 2。如果使用的是其他串行端口,请将参数名称中的 "2 "替换为相应的串行端口号。
SERIAL2_BAUD = 115(115200 bps)。
serial2_protocol = 1(MAVLink1)或 2(MAVLink2)
可选择设置 brd_ser2_rtscts = 0 则禁用串行流控制
如果使用第一个挂载,请设置以下参数:
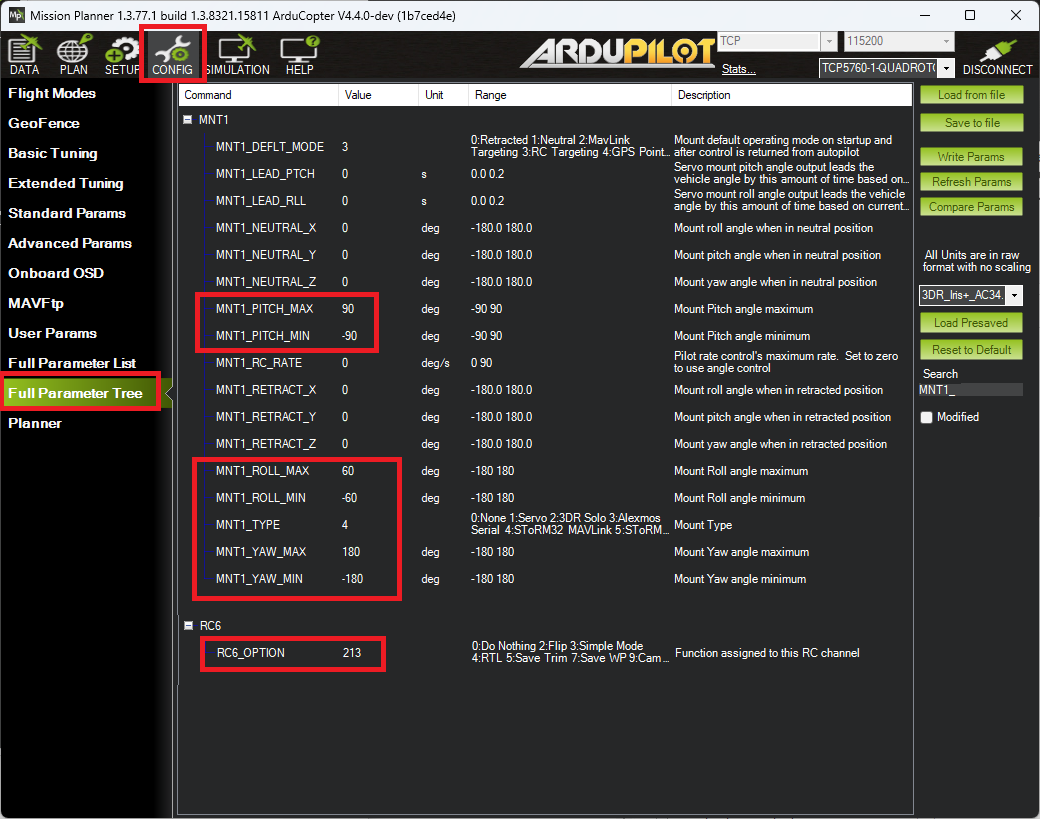
MNT1_TYPE = 4(SToRM32 MAVLink)并重新启动(飞行)控制器
设置 MNT1_YAW_MIN, MNT1_YAW_MAX, MNT1_PITCH_MIN, MNT1_PITCH_MAX, MNT1_ROLL_MIN, MNT1_ROLL_MAX 以匹配云台的范围。
可选择设置 RC6_OPTION = 213 通过发射机的 ch6 飞行稳定调整旋钮控制万向节的音高。
下面的截图显示了云台的设置:
偏航旋转 360 度 (MNT1_YAW_MIN = -180, MNT1_YAW_MAX = 179)
60 度(左右)滚动 (MNT1_ROLL_MIN = -60, MNT1_ROLL_MAX = +60)
可以直接指向下方 (MNT1_PITCH_MIN = -9000)
可以直接指向上方 (MNT1_PITCH_MAX = +90)
万向节的螺距由发射机的通道 6 飞行稳定调整旋钮控制
使用 SToRM32 串行协议时的设置¶
要使用串行协议,除以下设置外,其他设置与上述设置相同:
何时 配置云台 控制器将 "MAVLink 配置 "参数设置为 "无心跳"
serial2_protocol = 8(SToRM32 云台串口)。如果云台连接了另一个串行端口,则用串行端口号替换 "2"。
MNT1_TYPE = 5(SToRM32 串行接口)
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情
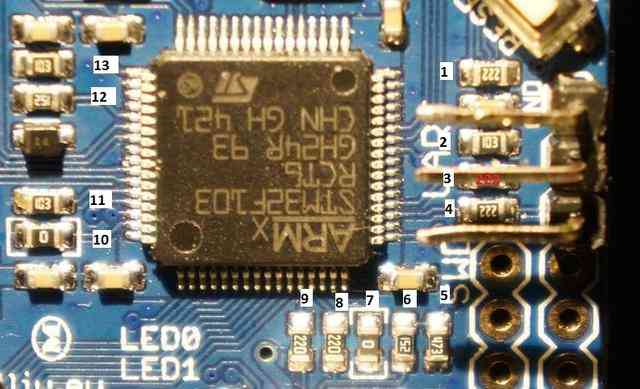
某些电路板上的电阻器问题¶
深入分析 在 rcgroups 上 结果发现,有些 STorM32 板需要将 4 号电阻器(如下图所示)短路(即在电阻器顶部焊接一根导线,将其变成普通导线),这样万向节控制器的信息才能传到 Pixhawk。