摄像机控制和参数¶
本页概述了摄像机的一般设置参数以及控制摄像机的三种不同方式。相关页面详细介绍了 可在此处找到万向节控制装置.
参数¶
ArduPilot 最多支持两台摄像机。下面是第一个摄像头的示意图:
CAM1_TYPE:相机快门(触发器)类型
CAM1_DURATION:相机打开快门的持续时间
CAM1_SERVO_ON:相机伺服开启 PWM 值(仅限伺服型快门)
CAM1_SERVO_OFF:相机伺服关闭 PWM 值(仅限伺服型快门)
cam1_trigg_dist:摄像机触发距离。如果该值不为零,则无论(飞行)控制器处于何种模式,只要位置变化达到该米数,摄像机就会触发。
CAM1_RELAY_ON:摄像机继电器 ON 值。这将设定继电器触发时是高电平还是低电平。请注意,您还应适当设置相机的 RELAY_DEFAULT(仅限继电器类型快门)。
cam1_intrval_min:相机拍摄照片的最短时间间隔
CAM1__MNT_INST:如果摄像机与 MOUNTx 实例相关联,则表示是哪个 MOUNTx 实例。例如,如果 CAM1 与 MOUNT2 关联,则此值为 2。该参数的默认值为 0,表示安装实例与摄像机实例相同,即 CAM1 位于 MOUNT1 中,在这种情况下与值 "1 "相同。这样可以将摄像机命令导向正确的 MOUNT 实例。
CAM1_OPTIONS注意:如果设置了第 0 位,且摄像机/支架具有开始/停止录像的功能,则会在上膛时开始录像,在撤膛时停止录像。
备注
请务必设置 CAMx_INTRVAL_MIN 要大于相机在使用相机触发功能时拍摄照片的最快速度。
CAM_MAX_ROLL:最大照片滚动角度。如果滚动角度大于限值,则推迟拍摄。(0=禁用,无论滚动角度如何都将拍摄)。
自动摄像机:仅在自动模式下进行距离触发。
用遥控发射器控制¶
RC 辅助功能 允许飞行员使用遥控发射器开关控制相机功能。
设置 RC6_OPTION = 9("相机触发器")拍摄照片
设置 RC7_OPTION = 166("摄像机录制视频")开始/停止录制视频
设置 RC8_OPTION = 167("相机变焦")放大或缩小
设置 RC9_OPTION = 168("手动调焦"),可调入或调出焦距
设置 RC10_OPTION = 169("自动对焦")自动对焦
地面站控制¶
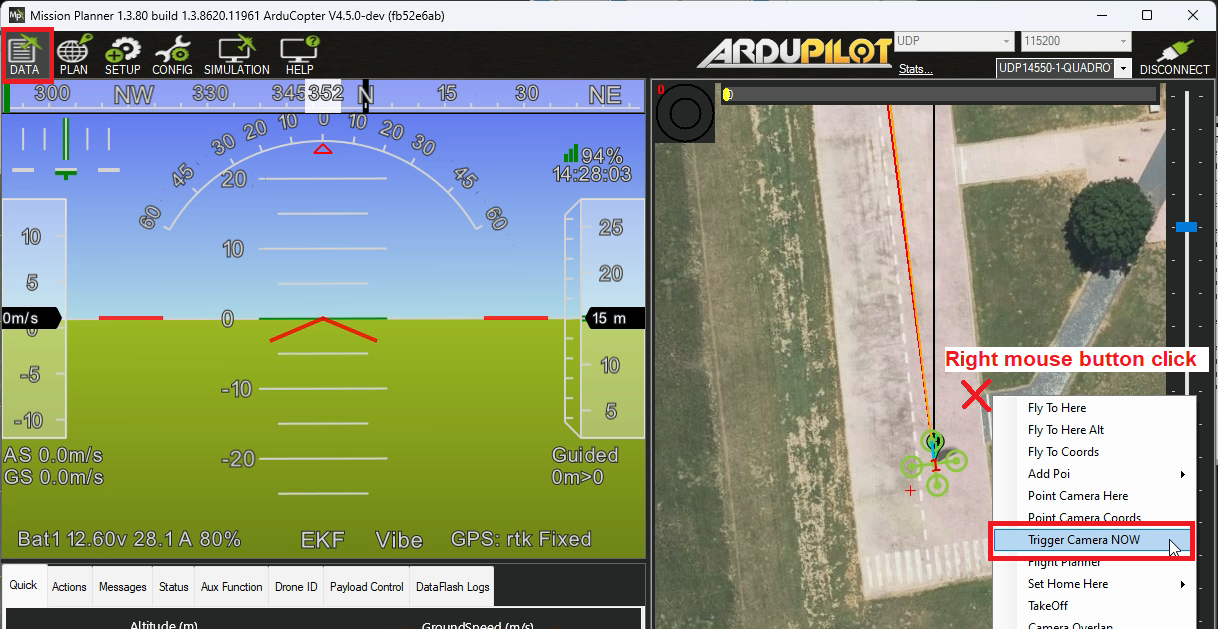
地面站可以发送 MAVLink 命令来控制相机。每个地面站的界面都不相同,以下是Mission Planner地面站提供的控制界面。
使用鼠标右键菜单拍照,选择 "立即触发相机"。
从 "数据"、"辅助功能 "选项卡中使用上述任何辅助功能控制。
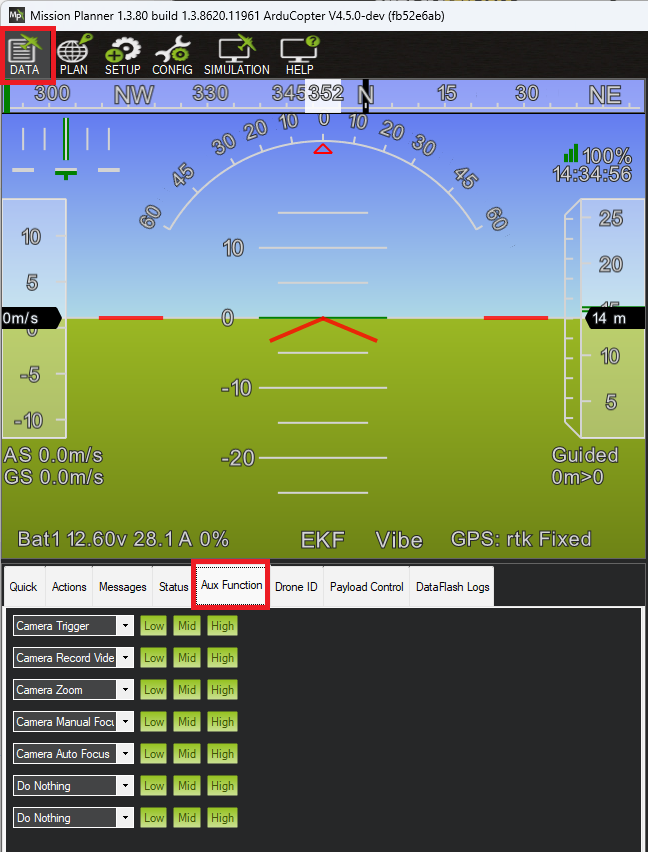
请注意,这些按钮是 "边沿触发 "的,这意味着要多次触发某个功能,您可能需要在按下 "高 "按钮之间按下 "低 "或 "中 "按钮。
自动模式任务期间的控制¶
有关在自动模式任务期间控制摄像机的详细信息,包括指定何时触发摄像机快门或载具在拍摄之间的行驶距离,请参阅这几页。