ViewPro 云台¶

ArduPilot 4.4(及更高版本)支持 ViewPro 云台使用 Lua 脚本 它能理解 ViewPro 的自定义串行协议。
连接和配置¶
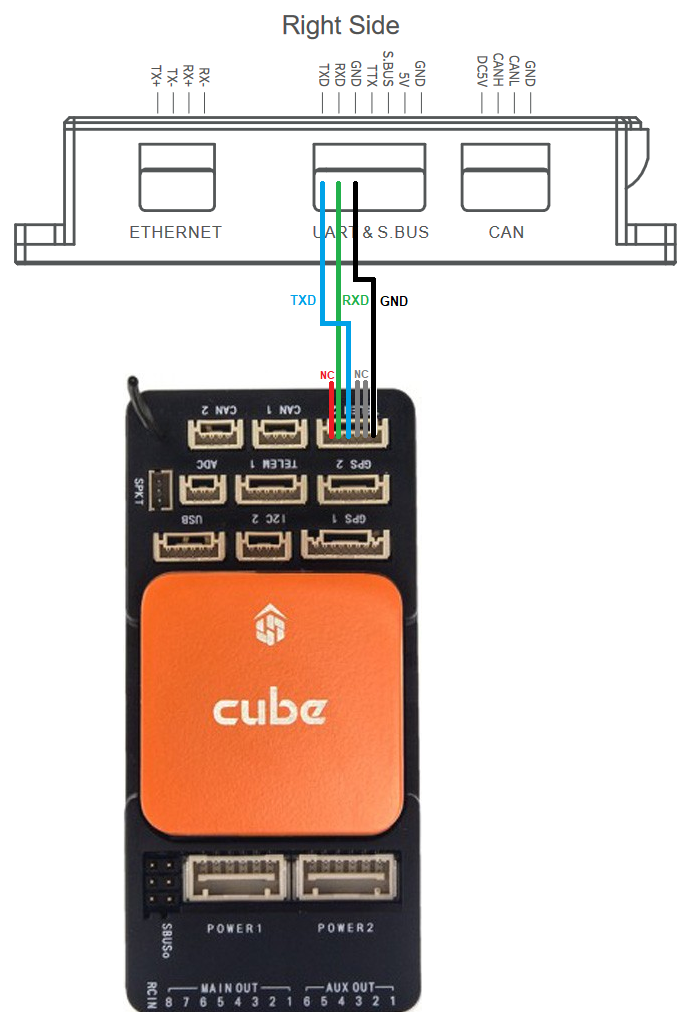
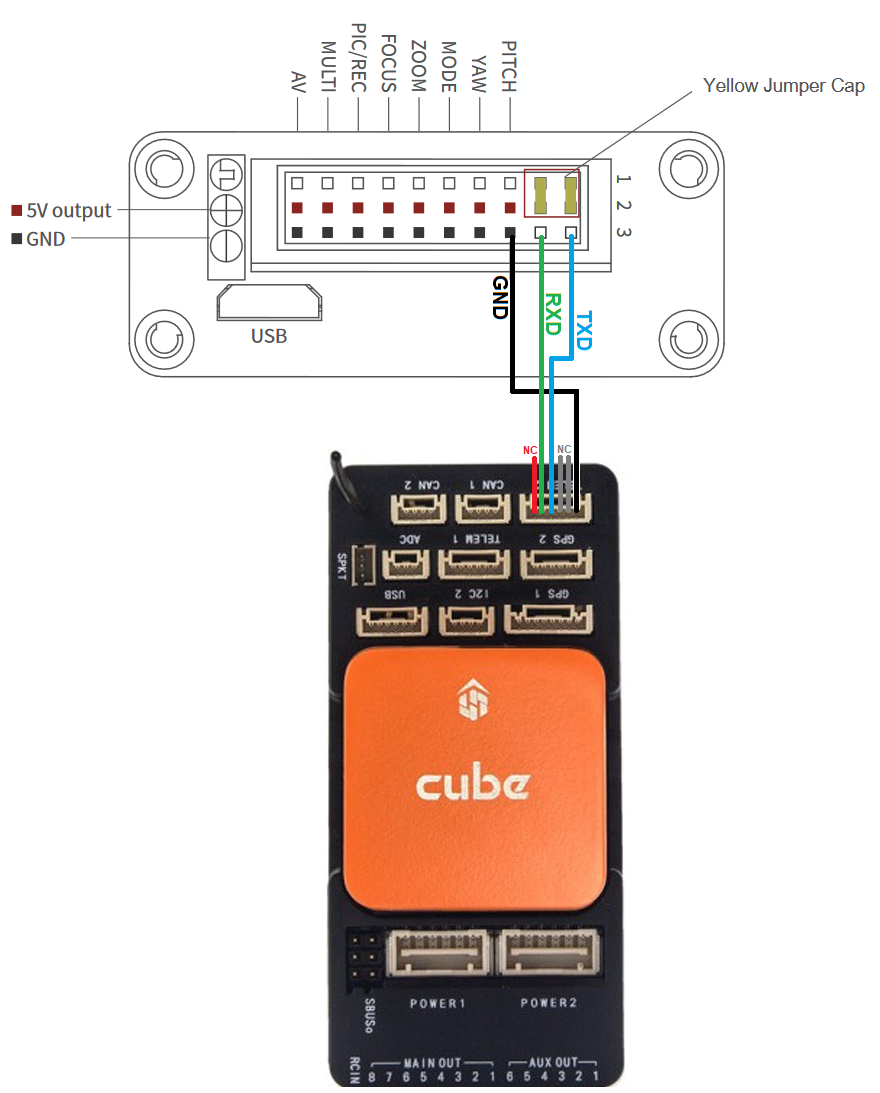
将(飞行)控制器的一个串行端口连接到云台,如下图所示。第一张图片适用于使用 "视口 "连接的用户。
如果使用 4.5.x(或更高版本):
设置 serial2_protocol = 8(云台)。假设万向节连接到(飞行)控制器的串行 2 端口,但也可使用任何串行端口。
设置 SERIAL2_BAUD = 115
设置 MNT1_TYPE = 11(Viewpro)
设置 CAM1_TYPE = 4(安装)启用安装驱动程序控制摄像机
RC6_OPTION = 213("安装俯仰角")通过 RC 通道 6 控制万向节的俯仰角
RC7_OPTION = 214("安装偏航")通过 RC 通道 7 控制云台的偏航角度
还可选择以下辅助功能
RC9_OPTION = 166("摄像机录制视频")开始/停止录制视频
RC9_OPTION = 168("相机手动对焦")调节焦距的远近
RC9_OPTION = 169("相机自动对焦")触发自动对焦
RC9_OPTION = 174("相机图像跟踪")跟踪图像中心的内容
RC9_OPTION = 175("摄像机镜头"),选择发送到 GCS 的视频流
如果使用 4.4.x:
设置 serial2_protocol = 28(脚本)。假设万向节连接到(飞行)控制器的串行 2 端口,但也可使用任何串行端口。
设置 SCR_ENABLE = 1 启用脚本并重启(飞行)控制器
设置 MNT1_TYPE = 9(脚本)启用挂载/云台脚本驱动程序
设置 CAM1_TYPE = 4(安装)以启用使用安装驱动程序控制摄像机 1 的实例
从此处下载 mount-viewpro-driver.lua 并将其复制到(飞行)控制器 SD 卡的 APM/脚本目录中,然后重新启动(飞行)控制器
对于配有多台摄像机的云台,辅助开关可通过以下方式控制当前使用的摄像机
设置 RC9_OPTION = 300(脚本1),以便使用 RC9 选择活动摄像机。请注意,可以使用任何辅助开关。
运行驱动程序脚本时,会创建三个新参数:VIEP_CAM_SWLOW、VIEP_CAM_SWMID 和 VIEP_CAM_SWHIGH。当辅助开关处于低、中和高位置时,这三个参数分别控制活动摄像机。可能的值为
0: 摄像机选择不变
1: EO1
2: 红外热
3: EO1 + 红外画中画
4: 红外 + EO1 画中画
5: 融合
6: IR1 13mm
7: IR2 52 毫米
设置驱动程序脚本创建的 VIEP_ZOOM_SPEED 参数,以控制缩放速度(数值在 0 和 7 之间)
控制和测试¶
测试视频流¶
要使用 Windows PC 测试视频流是否正常,请将摄像机的以太网电缆连接到本地路由器。
下载并安装 VLC 媒体播放器
在电脑上打开设置、网络、互联网、以太网。
找到 "IP 分配 "部分,点击 "编辑 "按钮并选择 "手动"。
将 IPv4 滑块移至开
IP 地址192.168.2.118
子网掩码:255.255.255.0
网关: 192.168.2.1
首选 DNS: 10.10.0.101
按 "保存"(注意,您可能会失去网络连接)
打开 VLC 媒体播放器,选择媒体,打开网络流,网络并输入" "。rtsp://192.168.2.119:554"
完成测试后,将电脑的 "IP 分配 "恢复为 "自动 (DHCP)",从而恢复网络。
下载图像和视频¶
如果使用以太网连接云台,则可以使用内置网络服务器手动下载存储在 SD 卡上的图像和视频。使用您喜欢的浏览器打开 http://192.168.2.119:8554/download (假设云台使用的是默认 IP 地址)。
wget 也可使用单个命令下载所有图像和视频
在 Windows 上、
wget.exe -r -l 10 --转换链接 http://192.168.2.119:8554/download/在 Linux/Ubuntu 上
wget -r -l 10 --转换链接 http://192.168.2.119:8554/download/