RC 输入通道映射 (RCMAP)¶
本文介绍如何使用 RCMAP 功能设置非标准 RC 输入通道映射。
配置¶
默认情况下,RC 输入通道为
通道 1:滚动输入
通道 2:音高输入
通道 3:节气门输入
通道 4:偏航输入
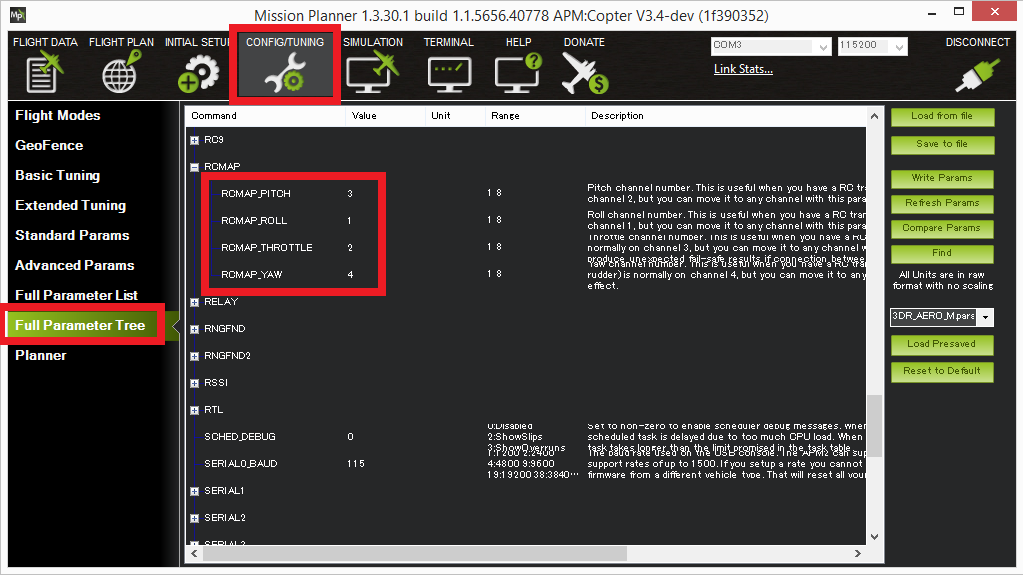
可以通过设置 RCMAP_ROLL, RCMAP_PITCH, RCMAP_THROTTLE 和 RCMAP_YAW 参数,使用 Mission Planner地面站's 配置/飞行稳定调整 | 完整参数树 (或完整参数列表),如下图所示。
更改这些参数后,应重新启动(飞行)控制器。