遥测/串行端口设置¶
本文介绍了如何配置(飞行)控制器上的遥测端口(又称串行端口)。说明使用的是 Pixhawk,但适用于大多数(飞行)控制器。
概述¶
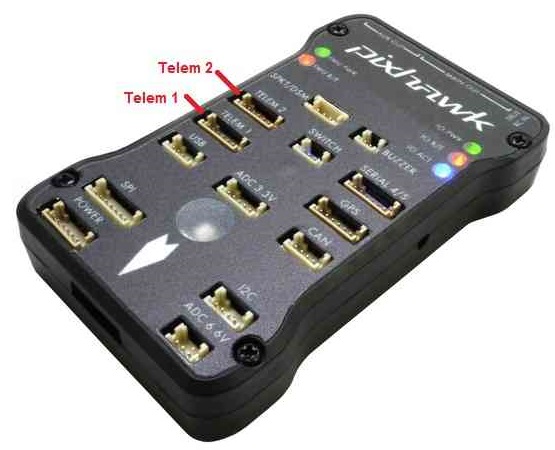
Pixhawk 上共有 5 个串行端口。每个端口的默认用途是
微型 USB 端口(又称串行 0)用于使用 USB 电缆连接地面站。飞行中不应连接该端口,因为飞行代码假定,如果它通过该端口接收电源,则它是在工作台上,而不是在地面站上。 故障排除 (即电池故障保护)被禁用。
Telem1(又名串行 1)用于 MAVLink 通信,支持流量控制。它尤其适用于大功率设备(最大 1 安培),但不适合与 MAVLink 通信。 RFD900 遥测无线电
备注
许多非 Pixhawk (飞行)控制器的端口供电线路甚至无法提供 1 安培的电流。请务必核实(飞行)控制器的规格。如果没有规定,请将电流限制在 200 mA。
Telem2(又名串行 2)用于 MAVLink 通信,支持流量控制。
GPS(又名串行 3)用于连接 GPS
有关每个端口确切引脚的更多详情,请查阅 这里.
通过地面站进行设置¶
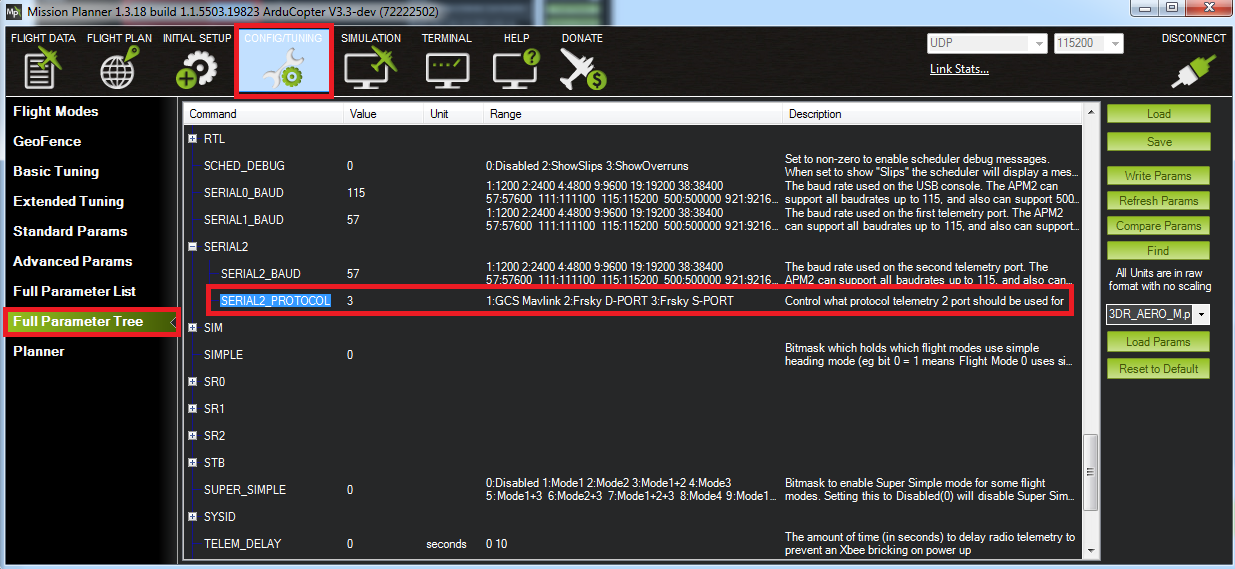
遥测端口可通过地面站设置以下参数进行配置。如果使用 Mission Planner地面站 打开 配置/飞行稳定调整 | 完整参数列表 page.
SERIALx_PROTOCOL参数(其中 "x "为 0 至 4 的数字,即 serial1_protocol)控制串行端口的协议或用途。您将在维基页面上看到 Lightware 激光雷达页面 选择适当协议的说明。SERIALx_BAUD(即 SERIAL1_BAUD)设置串行端口的波特率或速度。brd_ser1_rtscts 和 brd_ser2_rtscts 参数允许在 Telem1 和 Telem2 上启用或禁用流量控制。
MAVLink1、MAVLink2 和码流速率¶
对于用于 MAVLink 通信的遥测端口,您可以通过设置 SERIALx_PROTOCOL 设置为 "1 "或 MAVLink2。 SERIALx_PROTOCOL 改为 "2"。
MAVLink2 支持数据包的 "签名",可提高安全性和灵活的信息长度,因此在可能的情况下应使用 MAVLink2,但一些较旧的遥测无线电设备无法理解 MAVLink2,因此默认使用 MAVLink1。
备注
从地面控制站上传和下载复杂围栏需要 MAVLink2。
正如 遥测日志页面 可以通过使用 SRx_* 参数(即 SR1_POSITION).
SRx 参数并不直接与 SERIALx 端口相关,而是与激活 MAVLink 协议的端口顺序相关。
Mission Planner地面站的 配置/飞行稳定调整 |计划器 屏幕的 遥测率 下拉菜单可以方便地设置这些参数。
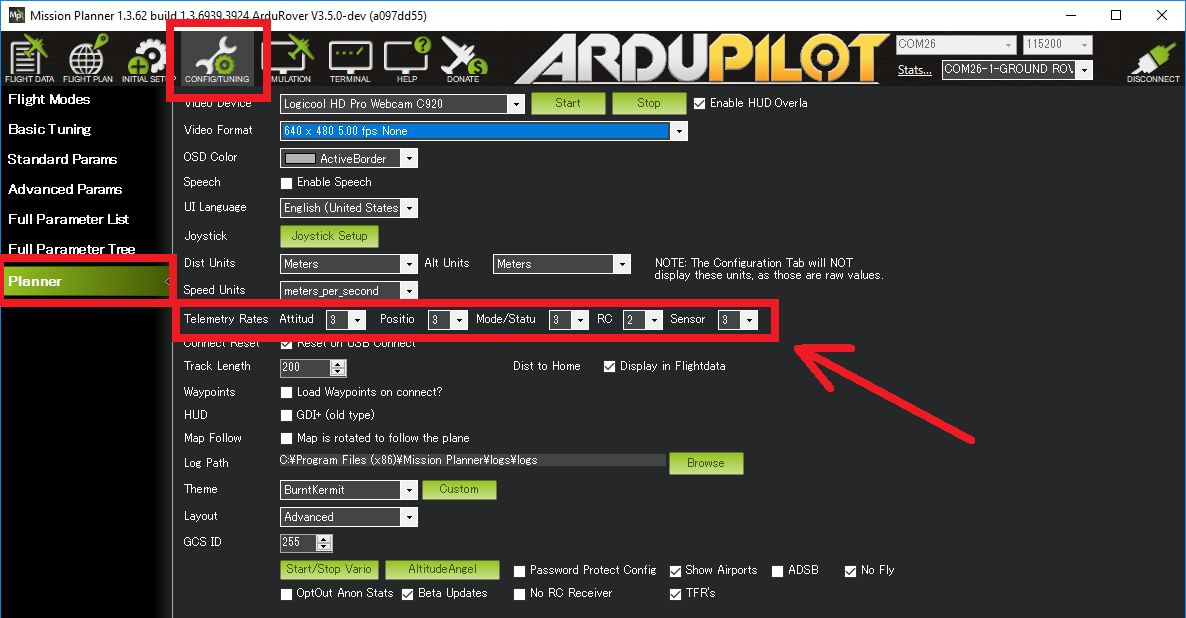
由于 CPU 或带宽限制,实际发送数据的速率可能低于所请求的速率。
备注
某些遥测系统需要特定的速率。为了允许在(飞行)控制器参数中设置这些参数而不被 GCS 覆盖,请将 MP 的速率设置为"-1",或使用 QGC 中的禁用选项。不过,在Mission Planner地面站中进行基本自动驾驶无线电校准之前不要设置这些参数,因为在校准过程中会强制使用新值,校准完成后也不会恢复这些值。
备注
大多数地面站通过发送 请求数据流 将 MAVLink 信息发送给飞行器,而不是直接设置上述参数。如果这样做,Copter 不 将速率更改保存到 eeprom 中,这意味着它们不会在重启后继续存在。
在实际操作中,用户可能会注意到,如果载具重新启动,但遥测连接没有断开并重新连接,那么来自载具的数据可能会更慢或丢失。例如,载具在地图上的位置可能无法更新。通常断开/重新连接地面站就可以解决这个问题。