冗余遥测链路¶
许多高价值飞行器使用单一遥测链路进行飞行器遥控、遥测和视频。虽然正确设置的全球控制 系统故障保护装置通常能使飞行器安全返回,但如果该链路在返回时仍无法工作,则 可能无法实现安全着陆。
因此,拥有冗余遥测链路通常是一项明智的投资。例如,如果主要链路是基于 LTE 的,那么额外的长距离 900 Mhz 或 433 Mhz 链路可能是值得投资的。即使是较短距离的 WIFI 链路,也可以在正确设置的 GCS 故障安全系统返回原点后重新建立控制,以便控制飞机安全着陆。
Mission Planner地面站和 MAVProxy 都提供了与飞行器建立冗余链接的方法,并可在其显示和控制台中进行切换。就 MAVProxy 而言,这种切换是根据最佳链路性能自动完成的,也可以在Mission Planner地面站中手动完成。
Mission Planner地面站¶
建立主要联系的说明 在别处.为了建立与载具的第二条(或第三条或第四条等)联系:
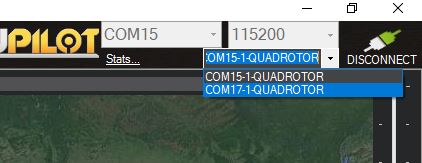
右键单击 "断开连接 "按钮,获得下拉连接选项菜单

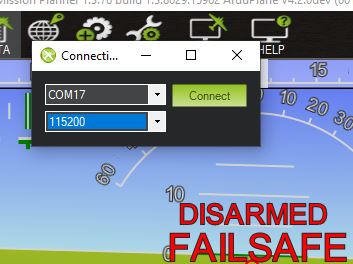
选择连接选项,并在对话框中填写下一个链接的具体信息
然后就可以通过这个下拉框选择要在各种选项卡/视图/菜单中显示的链接:
MAVProxy¶
参见 MAVProxy 链接管理 获取有关添加遥测链接的信息。
列出所有链接:
链接 清单
强制某个链接为活动链接,以接收命令、参数更改等。
设置 链接 x
向所有链接发送命令:
所有链接 <cmd>;
例如:Allinks 模式 RTL