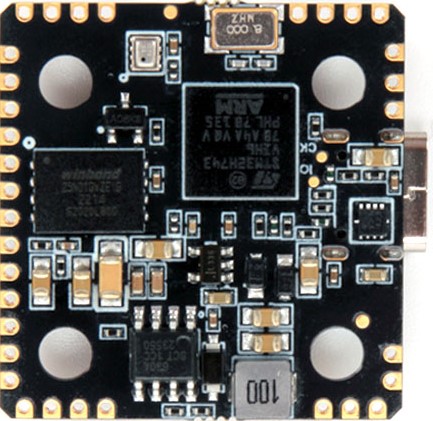
Holybro Kakute H7 Mini v1.3¶
上图和部分内容由 圣卡罗
规格¶
处理器
STM32H743 32 位处理器
AT7456E OSD 视频处理器
128 MB 数据闪存,用于记录
传感器
BMI270(加速器和放大器;陀螺仪)
BMP280 气压计
电源
直接从电池输入 7V ~ 26V 电源
5V 2A 外设电源
接口
9x PWM 输出(8 个伺服/电机 + WS2812 LED)
6 个 UART/串行接口,用于 GPS 和其他外设
1 个 I2C 端口,用于外接指南针
电池电压和电流传感器输入端
USB-C 端口
模拟 RSSI 输入(引脚 8)
蜂鸣器输出
购买地点¶
可在许多零售商处购买,包括 圣卡罗
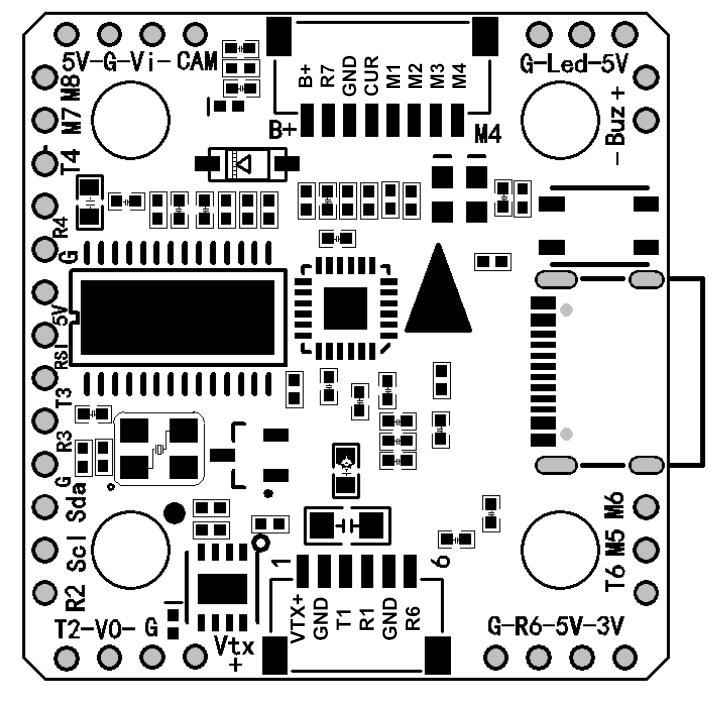
引脚¶
针脚 |
功能 |
|---|---|
VTX+ |
9V 用于高清系统或其他 VTX,默认由 RELAY2 控制 ON/OFF。参见 继电器开关 可由 RELAY2 控制 |
SDA、SCL |
I2C 连接(用于外设) |
5v |
5V 输出(最大 1.5A) |
3v3 |
3.3v 输出(最大 0.25A) |
维 |
来自 FPV 摄像机的视频输入 |
Vo |
视频输出到视频发射器 |
CAM |
照相机 OSD 控制 |
G 或 GND |
地面 |
RSI |
接收器输入的模拟 RSSI(0-3.3 伏 |
R2、T3 |
UART2 RX 和 TX |
R3、T3 |
UART3 RX 和 TX |
R4、T4 |
UART4 RX 和 TX |
R6、T6 |
UART6 RX 和 TX(UART6 RX 也位于 GH 插头中) |
发光二极管 |
WS2182 可寻址 LED 信号线 |
Z- |
压电蜂鸣器负脚 |
电调端口¶
针脚 |
功能 |
|---|---|
B+ |
电池正极电压(2S-6S) |
R7 |
UART7 RX |
接地 |
地面 |
当前 |
当前 |
M1 |
电机信号输出 1 |
M2 |
电机信号输出 2 |
M3 |
电机信号输出 3 |
M4 |
电机信号输出 4 |
VTX 端口¶
针脚 |
功能 |
|---|---|
Vtx+ |
9V 用于高清系统或其他 VTX,默认由 RELAY2 控制 ON/OFF。参见 继电器开关 |
G |
地面 |
T1 |
UART1 TX |
R1 |
UART1 RX |
G |
地面 |
R6 |
UART6 RX |
UART 映射¶
在上述引脚布局中,UART 的标记为 Rn 和 Tn。Rn 引脚是 UARTn 的接收引脚。Tn 引脚是 UARTn 的发送引脚。
SERIAL0 -> USB
SERIAL1 -> UART1(默认为 DJI 护目镜 OSD) 支持 DMA
SERIAL2 -> UART2 (Telem2) 无 DMA
SERIAL3 -> UART3 (GPS) 支持 DMA
SERIAL4 -> UART4 支持 DMA
SERIAL6 -> UART6(用于 RC 输入和 RC 遥测,不支持 PPM) 支持 DMA
SERIAL7 -> UART7(仅接收,默认为 ESC 遥测) 无 DMA
RC 输入¶
RC 输入配置在 R6(UART6_RX)引脚上。它支持除 PPM 以外的所有 RC 协议。参见 无线电控制系统 了解特定遥控系统的详细信息。 serial6_protocol 默认设置为 "23",以启用此功能。
SBUS/DSM/SRXL 连接到 R6 引脚。
FPort 需要连接 T6 和 serial6_options 设置为 "7"。
除 R6 外,CRSF 还需要 T6 连接,并自动提供遥测功能。设置 serial6_options 为 "0"。
SRXL2 需要与 T6 连接,并自动提供遥测功能。设置 serial6_options 到 "4"。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
OSD 支持¶
KakuteH7 Mini v1.3 支持 OSD,可使用 OSD_TYPE 1(MAX7456 驱动程序)。默认设置还允许 UART1 支持 DJI Goggle OSD。
PWM 输出¶
KakuteH7 Mini 最多支持 9 路输出。M1 至 M4 可通过连接器访问,它们是 双向 能够。M5-M8 和 LED 是上图所示的焊盘。M1-M8 和 LED 输出支持 DShot 以及所有 PWM 类型。PWM 分为 5 组:
第 1 组 PWM 1,4
第 2 组 PWM 2,3
第 3 组中的 PWM 5,6
PWM 7、8(第 4 组
第 5 组 PWM 9(默认为 NeoPixel LED)
同一组内的通道需要使用相同的输出率。如果一个组中的任何通道使用 DShot,那么该组中的所有通道都需要使用 DShot。
电池监测¶
电路板内置电压传感器。电压传感器最多可处理 6S 锂聚合物电池。外部电流传感器可连接到电调连接器的第 4 针上。
正确的电池设置参数是
BATT_MONITOR 如果使用外部传感器,则为 4;如果仅使用电压,则为 3
BATT_CURR_PIN 11 ,如果使用外部传感器。
BATT_VOLT_MULT 11.1
batt_amp_pervlt 应设置为与外部电流传感器(如果使用)相匹配。例如,如果使用 Holybro Teeko32 4in1 ESC,该值应为 59.5
备注
这些值已经默认设置,但可以根据需要进行更改,以调整电压和/或电流,或适应其他电调。
指南针¶
KakuteH7 Mini v1.3 没有内置指南针,但您可以使用 SDA 和 SCL 焊盘上的 I2C 连接外部指南针。
记录¶
KakuteH7 Mini v1.3 支持板载数据闪存记录。
将 ArduPilot 载入电路板¶
初始固件加载可通过 DFU 完成,方法是插入 USB 并按下引导加载器按钮。参见 在没有现有 ArduPilot 固件的电路板上加载固件
固件¶
可以找到该电路板的固件 这里 子文件夹中标有 "KakuteH7Mini-NAND"。