总括 F7¶
以上图片和部分内容由以下提供 myairbot.com¶
备注
Copter-3.6.0 (及更高版本)支持该电路板
备注
由于闪存限制,该电路板不包含所有 ArduPilot 功能。请参见 固件限制 了解详情。
规格¶
处理器
STM32F745VG ARM
1MB 闪存
传感器
InvenSense MPU6000 IMU(加速度、陀螺仪),带隔振功能
InvenSense ICM20608 IMU(加速度、陀螺仪、指南针),带隔振功能
BMP280 气压计
接口
UARTS
PWM 输出
RC 输入 PWM/PPM,SBUS
用于外部罗盘的 I2C 端口
USB 端口
内置 OSD
电压和电流感应输入(需要外部电流传感器)
尺寸和规格
36 毫米 x 36 毫米
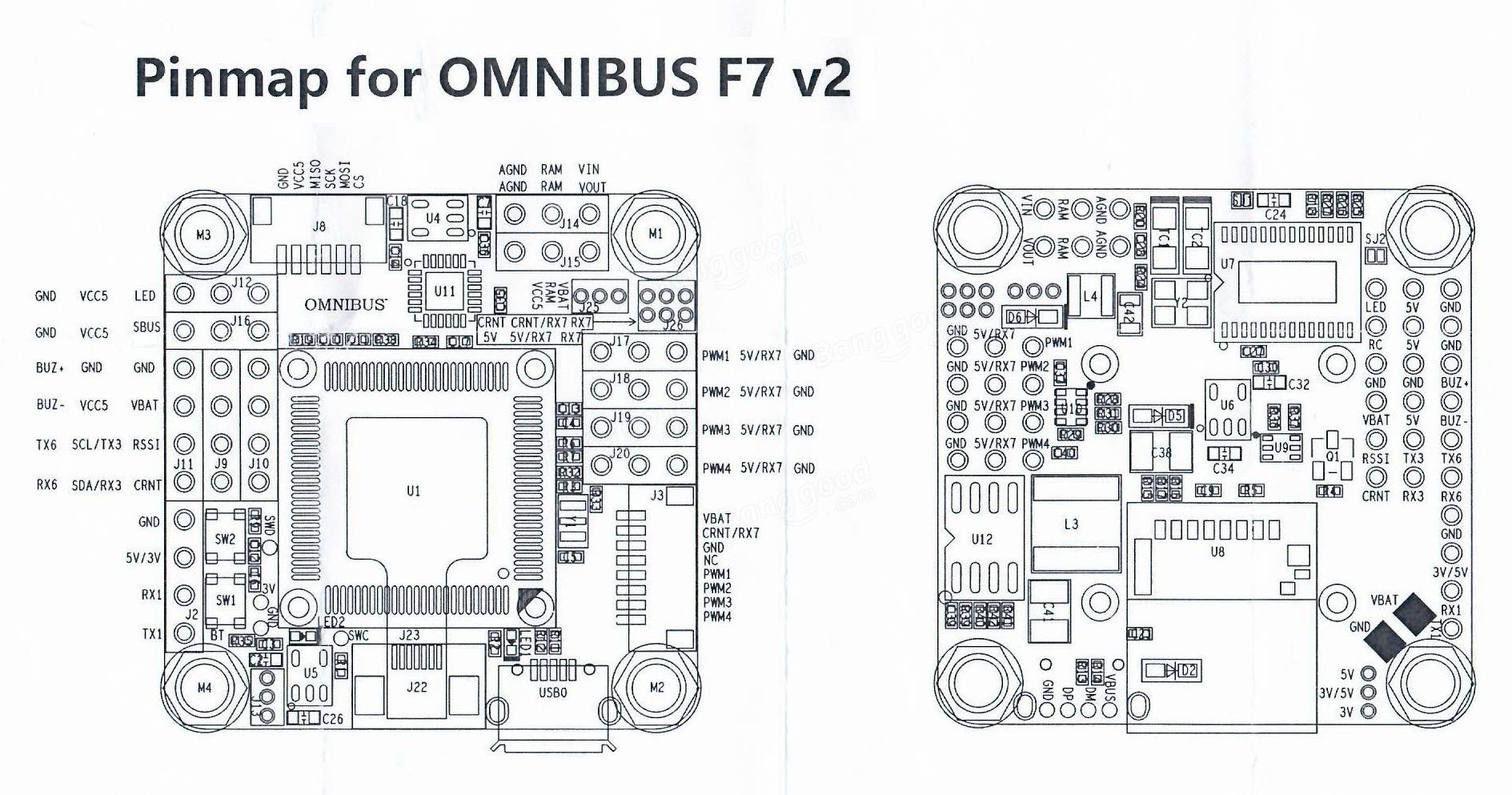
电路板连接¶
GPS 连接到 UART6
Telem 可在 UART 1 上使用
共享的 UART3/I2C 引脚默认只启用 I2C 操作,以便连接外部罗盘或数字空速传感器。
通过设置 BRD_ALT_CONFIG 为 2 时,这些引脚将从 I2C 变为 UART3 TX 和 RX 引脚。
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1
SERIAL2 = Telemetry2 = USART3,如果 BRD_ALT_CONFIG = 2,否则这些引脚将用于 I2C 引脚(固件 4.1 或更高版本)
serial3 = gps1 = usart6
SERIAL4 = GPS2 = USART2(RX,仅当 BRD_ALT_CONFIG = 1,否则该引脚将用于电路板上标有 SBUS 的 RC 输入)。
SERIAL5 = USER = UART7(仅限 RX,仅限 V2 版)
SERIAL6 = 未指定
串行协议可根据个人喜好进行调整。
RC 输入¶
RC 输入配置在 SBUS (UART2_RX) 引脚上。它支持所有 RC 协议,但对于 FPort BRD_ALT_CONFIG 中所述,应将 SERIAL4_OPTIONS=15 设置为 1。 FPort 节。
配置¶
使用这些设置启用电池电量监控器 :
BATT_MONITOR=4
然后重新启动。
batt_amp_offset 0.008
BATT_VOLT_MULT 10.925
batt_amp_pervlt 58.0(注意,如果使用 Matek Systems FCHUB A5 电流传感器,此值有效......如果使用其他品牌的 PDB 板,则需要进行校准以匹配实际电流)
Dshot 能力¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。然而,输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置为 Dshot,而不是 PWM 输出。在配置为正常伺服/电机输出时,必须相同(PWM 速率或 Dshot)的输出组有:1/2 和 3/4:1/2 和 3/4。
购买地点¶
可从多个零售商处购买,包括 myairbot.com