极速小蜜蜂 F4¶
警告
该(飞行)控制器没有气压计。可添加外部气压计,或使用替代高度传感器进行操作,如室外使用 GPS 或室内使用测距仪(请参阅 "(飞行)控制器")。 EK3_SRC1_POSZ),但有以下注意事项。在飞机上,如果 GPS 丢失,用户应立即切换到手动模式,以避免坠机。在旋翼飞行器中,允许使用 GPS 操作,但不建议使用,因为高度保持模式不精确。请注意,如果 GPS 出现故障,而飞行器正在使用 GPS 获取高度信息,最终可能会因缺乏准确的高度信息而导致坠机。 使用 GPS 进行高度感应 了解更多信息。
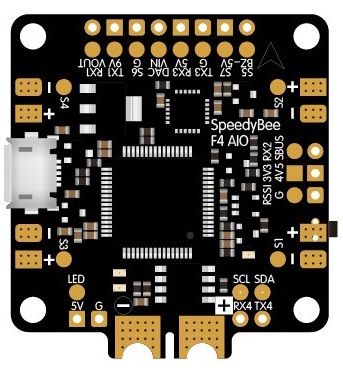
上图和部分内容由 speedybee.com
备注
在 Copter-3.6.1 中发布了对 SpeedyBee F4 的支持
规格¶
处理器和传感器
STM32F405 ARM 微控制器
InvenSense MPU6000 IMU(加速度、陀螺仪、指南针)
接口
4x PWM 输出
1x RC 输入(PWM/PPM,SBUS)
4 个串行端口输入(包括上述 RC 输入)
1x I2C,用于外部指南针
电池电压和电流监控器
车载蓝牙
USB 端口
3S 至 6S 输入功率
备注
该控制器未集成 ArduPilot 正常运行所需的气压计,因此必须连接外部气压计。
Dshot 能力¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。然而,输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置为 Dshot,而不是 PWM 输出。在配置为普通伺服/电机输出时,必须相同(PWM 速率或 Dshot)的输出组有1/2/3/4、5 和 6。
记录¶
该控制器支持记录到板载数据闪存。
购买地点¶
可从各种零售商处或直接从制造商处购买 SpeedyBee