SpeedyBeeF405WING 迷你飞翼¶
SpeedyBeeF405wing/Wing Mini 集成了飞机(飞行)控制器所需的所有功能:
足够的输出用于垂直起降固定翼飞行器应用以及普通复杂的固定翼飞机应用
全面的外设功能:GPS/Compass/模拟或数字空速/SBUS、PPM 或串行遥控/高清视频/测距仪等。
用于大多数外设的 JST-GH 连接器,用于电机/伺服和串行 RC 的杜邦连接器
集成电流和电压监控器
集成 OSD 或高清视频
通过 IRX TRAMP 或 SmartAudio 控制 VTX
集成无线遥测技术(WIFI MAVLink)
另外还有一些独特的功能:
多个 LED 灯串连接器,可选择预定义显示或通过(飞行)控制器控制
内置 LED 电池电量指示灯

以上图片和部分内容由 SpeedyBee
备注
由于闪存限制,该电路板不包含所有 ArduPilot 功能。请参见 固件限制 了解详情。
规格¶
处理器
STM32F405RGT6 ARM(168MHz)
AT7456E OSD
传感器
ICM-42688P IMU(加速度、陀螺仪)
SPL-06 气压计
电压放大器;120A 电流传感器
电源
2S - 6S 锂电池输入电压,带电压监控功能
90A 持续电流,215A 峰值电流监控器
9V/12/5V、1.8A BEC,用于为视频发射器供电,由 GPIO 控制(早期的 bd 版本没有此功能)
4.9V/6V/7.2V, 4.5A BEC,用于伺服系统
用于内部和外设的 5V、2.4A BEC
接口
12x PWM 输出,支持 DShot(串行 LED 输出为 PWM12)
1x RC 输入
5x UART/串行接口(用于 GPS 和其他外设,第 6 个 UART 内部绑定到无线板)
用于外部罗盘、空速等的 I2C 端口。
用于记录等的 microSDC 卡。
USB-C 端口
尺寸和规格
翼型:52 毫米 x 32 毫米 x 19 毫米 , 迷你型:37 毫米 x 26 毫米 x 14 毫米
翼:35克,缪尼:19克
购买地点¶
用户手册¶
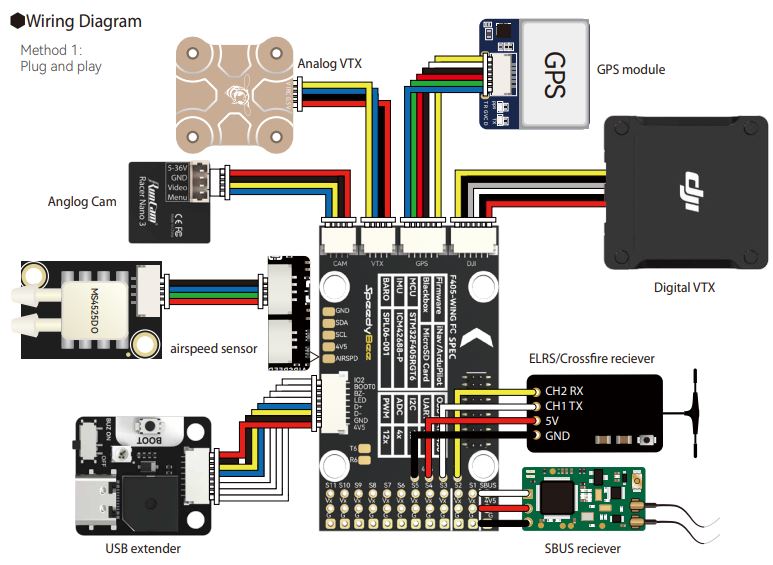
接线图¶
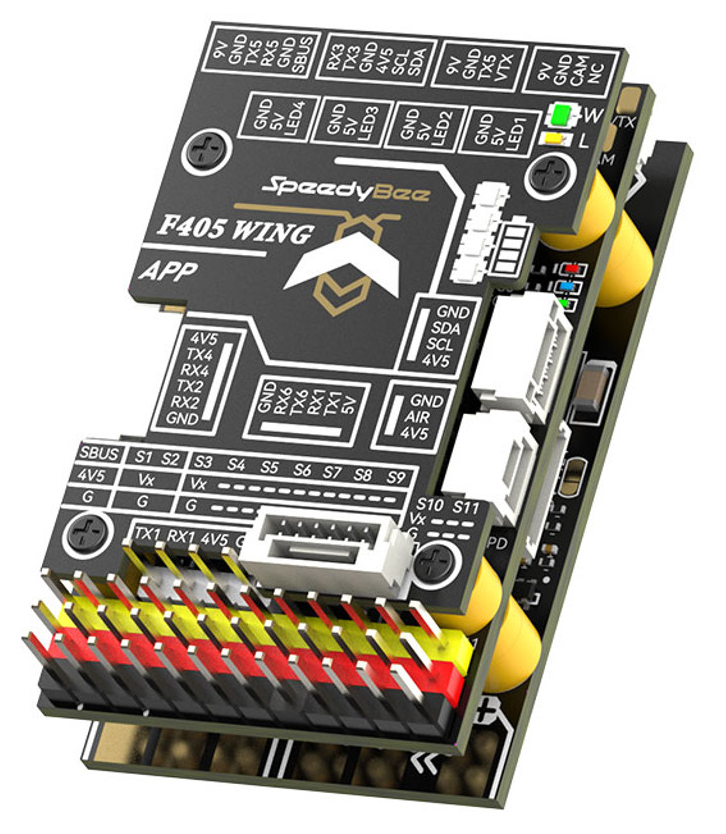
默认 UART 顺序¶
在上述引脚布局中,UART 的标记为 Rn 和 Tn。Rn 引脚是 UARTn 的接收引脚。Tn 引脚是 UARTn 的发送引脚。
SERIAL0 -> USB
SERIAL1 -> USART1(串行 RC 输入)(支持 DMA)
SERIAL2 -> USART2(RX 与反相 SBUS RC 输入绑定,但在下列情况下可用作普通 UART BRD_ALT_CONFIG =1)
SERIAL3 -> UART3 (GPS)(支持 TX DMA)
SERIAL4 -> UART4(用户)(支持 TX DMA)
SERIAL5 ->UART5(用户,可在 DJI 空中单元连接器上使用)(支持 TX DMA)
SERIAL6 -> UART6(与内部无线模块、MAVLink2 telem 绑定)
所示串行协议为默认设置,但可根据个人喜好进行调整。
伺服/电机输出¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。不过,将 Dshot、串行 LED 和正常 PWM 操作混合使用的输出受组别限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置并用作 Dshot,而不是 PWM 输出。
第 1 组 PWM 1、2
第 2 组 PWM 3、4
第 3 组 PWM 5-7
PWM 8-10 (第 4 组
注意:PWM12 默认设置为串行 LED 使用,如果 PWM11 用于电机或舵机,则必须将 PMW12 重新分配为正常的 PWM 输出,否则将无法使用。
RC 输入¶
SBUS 引脚通过反相器传递到 RX2(UART2 RX),默认情况下,RX2 被映射到定时器输入而不是 UART,可用于所有 ArduPilot 支持的接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,FPort 以这种方式连接时,可以提供无遥测的 RC。
要在 Fport、CRSF 和 SRXL2 接收器中使用 CRSF 和嵌入式遥测功能,应使用 UART1。使用该选项时 serial11_protocol 必须设置为 "23"(默认情况下已设置),并且:
不支持 PPM。
DSM/SRXL 连接到 RX1 引脚,但 SBUS 仍将连接到 SBUS。
FPort 需要通过双向逆变器连接 TX1 和 RX1。参见 FPort 接收器.
除 RX1 外,CRSF 还需要 TX1 连接,并自动提供遥测功能。ELRS 的连接方式与此相同,但 RX1 的第 13 位会自动提供遥测功能。 RC_OPTIONS 应设置为
SRXL2 需要与 TX1 连接,并自动提供遥测功能。设置 serial2_options 到 "4"。
备注
UART1 默认配置为串行接收器。您也可以同时在系统中设置多个接收器(通常用于远距离切换到远程 TX)。请参见 多个无线电遥控接收器 了解详情。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容(SBUS 需要在其他 UART 上进行外部反转)。请参见 无线电控制系统 了解详情。
备注
当连接 USB 时,SBUS 引脚上方的 "4V5 "引脚以及 GPS、Airspeed 和 Telem 连接器中的 4V5 引脚将获得供电。注意不要为 USB 源提供过多负载,否则可能会出现电压下降。所有其他 5V 引脚仅在有电池时供电。
WIFI¶
SpeedyBeeF405Wing 集成了无线模块,可通过 WIFI 与 GCS 连接。有关说明,请参阅用户手册。虽然 BT 被宣传为一种备用模式,但 ArduPilot 并未证明它适用于所有 BT 软件狗或手机。不过,WIFI 模式已在多种系统中进行过测试。请确保 SERIAL6_BAUD = 115,并且在默认情况下,与无线模块相连的 TX6/RX6 引脚没有任何负载。
OSD 支持¶
SpeedyBeeF405Wing 支持使用 OSD_TYPE 1(MAX7456 驱动程序)使用其内部 OSD。外部 OSD 支持(如 DJI 或 DisplayPort)使用 UART5 或任何其他免费 UART。请参见 MSP OSD 了解更多信息。
VTX 控制¶
UART5 TX 位于视频输出连接器中,用于对视频发射器进行 IRC Tramp 或智能音频控制。请参见 视频发射机支持 了解更多信息。
VTX 功率控制¶
GPIO 81 控制 VTX BEC 输出到标有 "9V "的引脚。将 GPIO 设置为高电平可消除对引脚的电压供应。
设置一个 RELAYx_PIN 到 "81 "来控制开关。然后选择一个 RC 控制通道(Chx)并设置其 RCx_OPTION 到相应的继电器(1-6),您已在上面设置了其引脚参数。
例如,使用通道 10 通过继电器 2 控制开关:
RELAY2_PIN = "81"
RC10_OPTION = "34"(继电器 2 控制)
电池监控器配置¶
这些设置在加载固件时设置为默认值(除 batt_amp_pervlt 需要更改默认值)。不过,如果丢失了这些参数,也可以手动设置:
启用电池监控器。
BATT_MONITOR =4
然后重新启动。
BATT_VOLT_MULT 11.05
连接 GPS/指南针模块¶
该电路板不包括 GPS 或指南针,因此需要一个 外置 GPS/指南针 应如下图所示连接,以便自主模式发挥作用。
固件¶
该电路板未预装 ArduPilot 固件。请使用此处的说明首次加载 ArduPilot 在没有现有 ArduPilot 固件的电路板上加载固件.
可以找到该电路板的固件 这里 子文件夹中标有 "SpeedyBeeF405WING"。