SWAN-K1 HWing¶
该(飞行)控制器是 飞行器 Tailsitter QuadPlane 是一款无控制的四旋翼飞行器。它安装了定制的 PX4 固件和可下载到智能手机上的 GCS 应用程序。本页介绍如何转换为 ArduPilot 固件及其设置。
最初提供的是 10 通道遥控发射机,使用外置智能手机进行 GCS 和视频显示,而专业版则配备了 12 通道系统,集成了 GCS/视频屏幕。

ArduPilot 固件安装¶
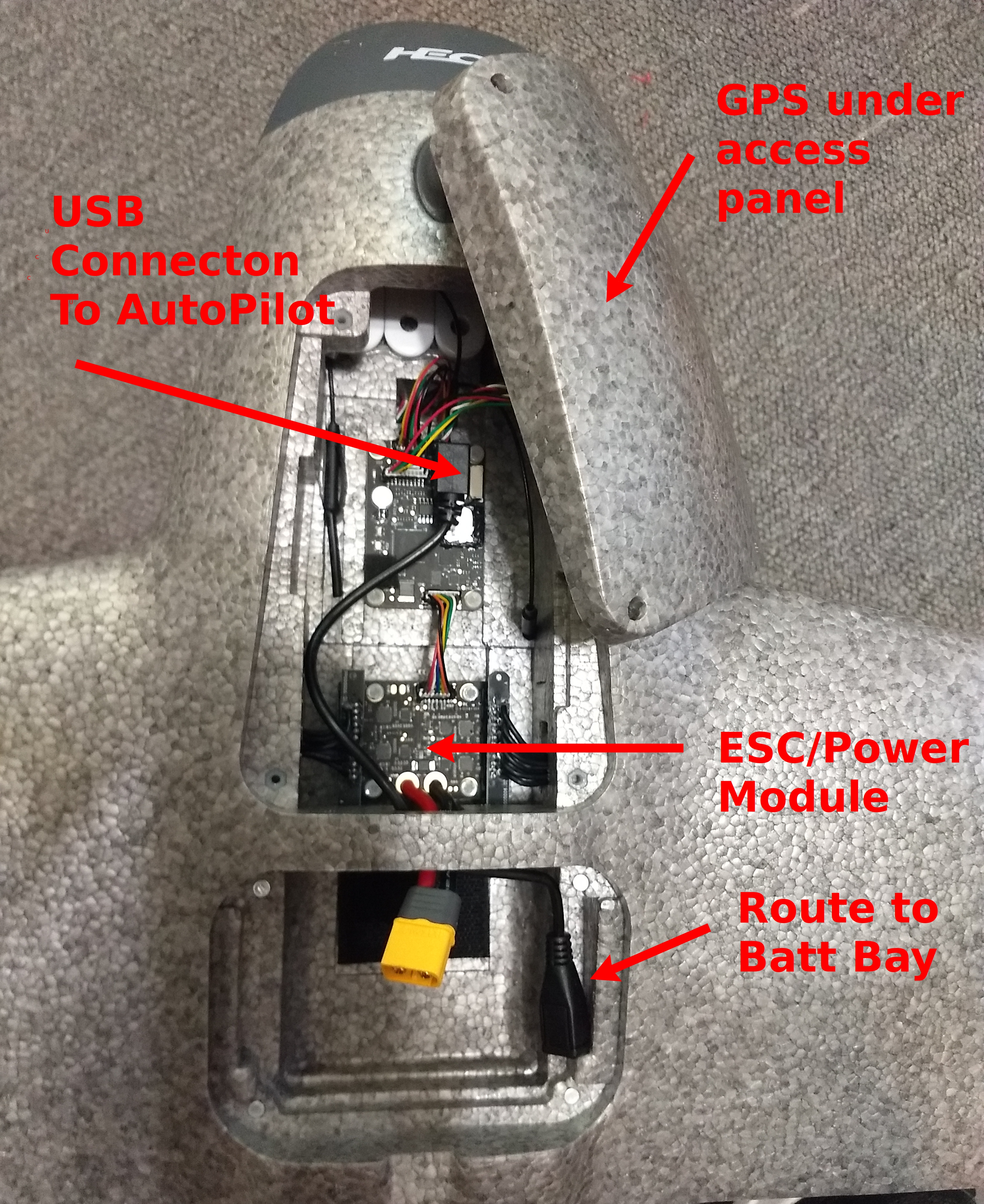
您需要取下检修盖,以便将 USB 电缆连接到(飞行)控制器。在电池舱内安装一个 90 度的 USB 短尾缆,将来可以方便地进行 USB 连接。
连接到 Mission Planner 或 QGC,并上传 SWAN-K1 的平面固件。 这里.
固件已为优化飞行稳定调整和操作设置了默认值。
校准¶
加载新的 ArduPilot 固件后,您只需 校准加速度计 和 校准指南针.加速度计校准的水平点应是固定翼的正常飞行姿态。
系统设置¶
默认设置为基本操作:
飞行模式位于左上方的三个位置开关上:QHOVER/QLOITTER/FBWA
QRTL 位于按钮 "B "上。请注意,这个按钮和其他按钮都是锁定拨动开关!
模式 2 AETR 杆设置。
上膛/撤膛通过最低油门下的方向舵完成。
备注
上膛后,让中心弹簧节流阀回到中心位置,载具可能会开始缓慢升起。此外,请确保仅在 QHOVER 或 QLOITER 状态下进行上膛!
故障触发保护机制默认设置为执行 混合 RTL/QRTL 用 Q_RTL_MODE = 3.
定制¶
使用 ArduPilot 的好处之一是可以轻松设置发射机功能。
使用的一些可能性 遥控辅助功能:
将其中一个开关设置为 "ARM/DISARM"(上膛/撤膛),以取代舵/油门组合,实现快速上膛。
在其他开关或按钮上设置其他飞行模式,如 "巡航 "或 "QLAND"。
在按钮上设置自动模式
设置 围栏 并通过开关或按钮启用/禁用。
发射机 RC 通道映射¶
控制 |
T10 |
H12 |
默认设置 |
|---|---|---|---|
棍棒 |
1-4 |
1-4 |
模式 2 AETR |
按钮 A |
7 |
7 |
|
按钮 B |
8 |
8 |
QRTL |
按钮/旋钮 C* |
9 |
9 |
|
按钮/旋钮 D* |
10 |
10 |
|
旋钮 G |
11 |
||
旋钮 H |
12 |
||
开关 E |
5 |
5 |
飞行模式开关 |
开关 F |
6 |
6 |
T10 是旋钮,H12 是锁定按钮
地面控制站连接¶
T10 发射机可通过蓝牙连接 MAVLink。您可以连接并运行任何 GCS(Mission Planner地面站、QGC 等)。
通过 H12 发射机,您可以加载并使用Mission Planner地面站。与安卓兼容的Mission Planner地面站小程序(.apk)位于 这里.但首先您必须下载并运行 HEQ .apk 应用程序 在启动Mission Planner地面站之前。
视频显示¶
使用 T10 发送机时,您必须通过发送机 USB 接口连接智能手机,并使用 HEQ Fly 应用程序 来显示视频。您可以通过蓝牙连接应用程序,以便在同一应用程序中显示有限的 GCS,但通常连接到另一台手机或电脑的 GCS 将允许使用 MAVlink 充分发挥 GCS 的功能。
H12 发射器内置视频显示屏。