桃子 FCC-K1¶
规格¶
- 处理器
STM32F427VIT6:32 位 ARM Cortex-M4,168 MHz 256 KB RAM 2 MB 闪存
IO 处理器:STM32F100C8T6:ARM Cortex-M3,32 位 ARM Cortex-M3,24 MHz,8KB SRAM
- 机载传感器
Accel/Gyro: ICM-20602
Accel/Gyro/Mag:MPU-9250
气压计MS5611
- 接口
8+5 PWM 输出(8 个来自 IO,5 个来自 FMU)
Spektrum DSM / DSM2 / DSM-X 卫星兼容输入
与 Futaba S.BUS 兼容的输入和输出
PPM 和信号输入
模拟/PWM RSSI 输入
S.Bus 伺服输出
安全开关/LED
4x UART 端口:TEM1、TEM2、GPS、SERIAL4
2 个 I2C 端口:I2C2, GPS
1x CAN 总线
1x ADC
模拟输入,用于输入 1 节电池的电压/电流
- 机械
尺寸40.2 x 61.1 x 24.8 毫米
重量:65 克
- 额定电压
电源输入(5V 至 5.5V)
USB 输入(4.75V 至 5.25V)
注
输出功率轨 FMU PWM 输出 和 I/O PWM 输出 不为(飞行)控制器电路板供电(也不由其供电)。您必须为以下设备之一供电 权力 或 USB 否则电路板将无法供电。
UART 映射¶
SERIAL0 -> USB
SERIAL1 -> USART2(TELEM1,RTS/CTS 引脚)启用 DMA
SERIAL2 -> USART3(TELEM2,RTS/CTS 引脚)启用 DMA
SERIAL3 -> UART4 (GPS1) 支持 DMA
SERIAL4 -> UART8 (GPS2) TX 仅支持 DMA
SERIAL5 -> UART7(调试)
串行端口协议(Telem、GPS 等)可根据个人喜好使用 SERIALx_PROTOCOL 参数。
RC 输入¶
RCIN 引脚默认映射为定时器输入,可用于所有 ArduPilot 支持的接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,以这种方式连接 Fport 时,只能提供 RC 而不提供遥测功能。
要在 Fport、CRSF 和 SRXL2 接收器中使用 CRSF 和嵌入式遥测功能,就需要使用完整的 UART(如 SERIAL4(UART8))来连接接收器。以下是使用 UART8 的设置。 serial4_protocol 应设置为 "23"。
Fport 需要 serial4_options 设置为 "15"
CRSF 将要求 serial4_options 设置为 "0"
SRXL2 需要 serial4_options 设置为 "4",仅连接 UART8 TX 引脚。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
PWM 输出¶
ThePeach FCC-K1 最多支持 13 路 PWM 输出。所有输出均支持所有常规 PWM 输出格式。
5 个 AUX 输出分为 2 组,也支持 DShot:
第 1 组中的 AUX 1、2、3 和 4
第 2 组中的 AUX 5
同一组中的 FMU 输出需要使用相同的输出率和协议。如果一个组中的任何输出使用 DShot,则该组中的所有通道都需要使用 DShot。
电池监测¶
电路板上有 1 个专用的电源监控器端口,端口上有一个针形连接器。它与(飞行)控制器随附的模拟电源监控器一起使用。
指南针¶
ThePeach FCC-K1 内置 MPU9250 指南针。由于存在潜在干扰,(飞行)控制器通常与外部 I2C 罗盘一起使用,作为 GPS/Compass 组合的一部分。
GPIO¶
5 个 AUX 输出可用作 GPIO(继电器、按钮、RPM 等)。要使用它们,需要将输出的 SERVOx_FUNTION 设置为-1。参见 GPIO 页面获取更多信息
Ardupilot 中用于 PIN 变量的 GPIO 编号为
AUX1 50
AUX2 51
AUX3 52
AUX4 53
AUX5 54
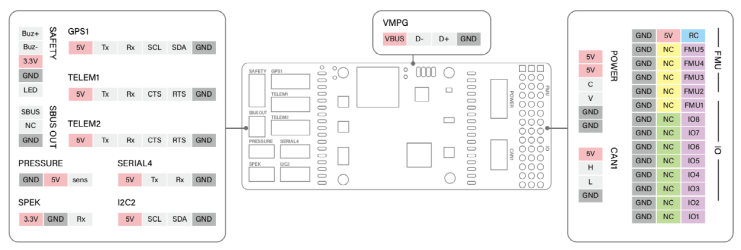
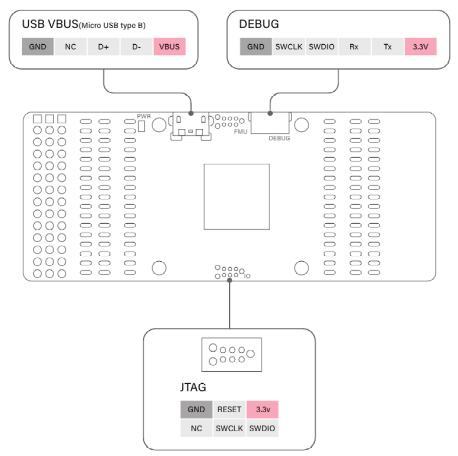
连接器¶
加载固件¶
电路板预装了与 ArduPilot 兼容的引导加载器,可通过任何与 ArduPilot 兼容的地面站加载 xxxxxx.apj 固件文件。
可以找到该电路板的固件 这里 在标有 "thepeach-k1 "的子文件夹中。
购买地点¶
订购 桃子