LightWare SF20 / LW20¶
"这款" Lightware SF20 和 LW20 LW20 是一种体积小、测距远(100 米)、精度高的测距仪。有两种型号,LW20/Ser 使用串行接口,LW20/I2C 使用 I2C 接口。

串行连接¶
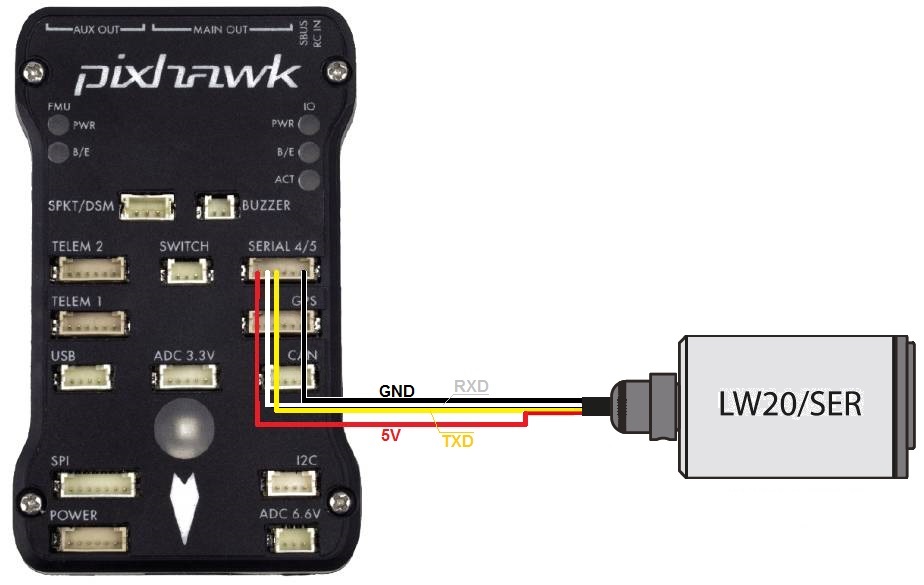
对于串行连接,您可以使用任何备用 UART。将 UART 的 RX 线连接到激光雷达的 TX 线,再将 UART 的 TX 线连接到激光雷达的 RX 线。同时连接 GND 和 5V 线路。您不需要流量控制引脚。
下图显示了如何连接 SERIAL4。
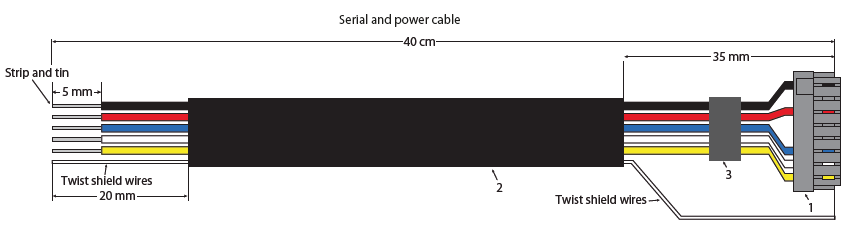
如果使用无外壳 SF20,请确保电缆如下所示:
然后,您需要设置串行端口和测距仪参数。如果您使用的是 Pixhawk 上的 SERIAL4/5 端口,那么如果是系统中的第一个测距仪,则需要设置以下参数(可以使用 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
serial4_protocol = 9(激光雷达)
SERIAL4_BAUD = 较新传感器为 115(115200 波特),2018 年年中之前生产的传感器为 19(19200 波特
RNGFND1_TYPE = 8 (LightWareSerial)
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 9500. 这是测距仪能够可靠读取的距离(厘米)。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
如果您使用的是 Pixhawk 上的 Telem2 端口,则应设置为 serial2_protocol = 9,以及 SERIAL2_BAUD 至 115(115200 波特)或 19(19200 波特)
请注意,某些飞行板上的激光雷达可能需要使用单独的 5V 电源。请参阅激光雷达使用手册中的功耗和(飞行)控制器上的外围电源限制。
I2C 连接¶
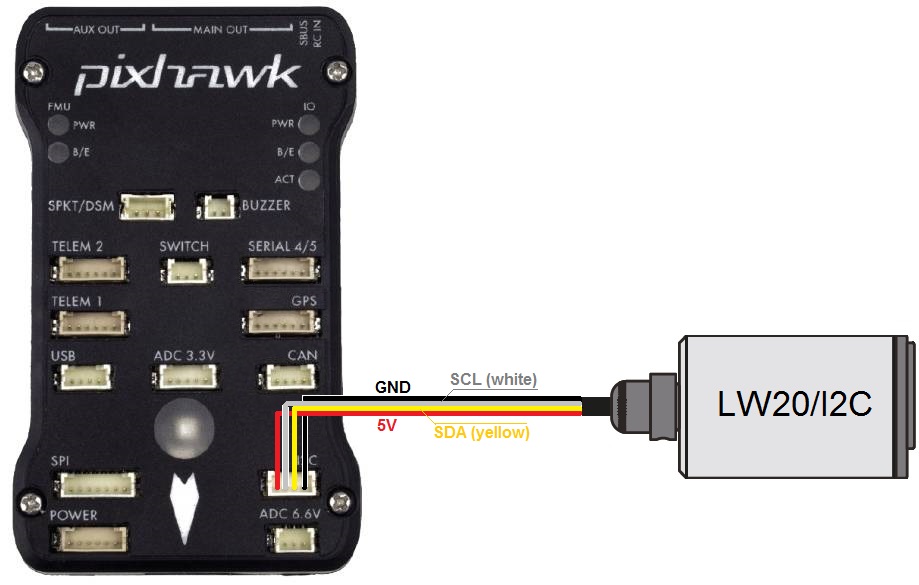
将激光雷达的 SDA 线连接到 Pixhawk I2C 端口的 SDA 线,将激光雷达的 SCL 线连接到 I2C 端口的 SCL 线。同时连接 GND 和 5V 线路。
如果使用无外壳 SF20,请确保电缆如下所示:
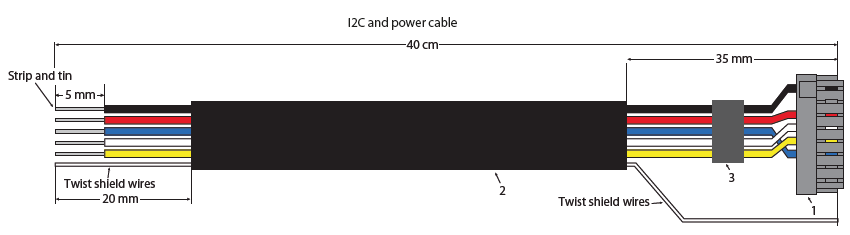
然后,您需要配置测距仪参数,如下图所示(可以使用 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
RNGFND1_TYPE = 7(LightWareI2C)
RNGFND1_ADDR = 102(激光雷达的 I2C 地址,十进制)。 请注意,该设置为十进制。默认地址为 0x66 十六进制,十进制为 102。
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 9500. 这是测距仪能够可靠读取的距离(厘米)。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
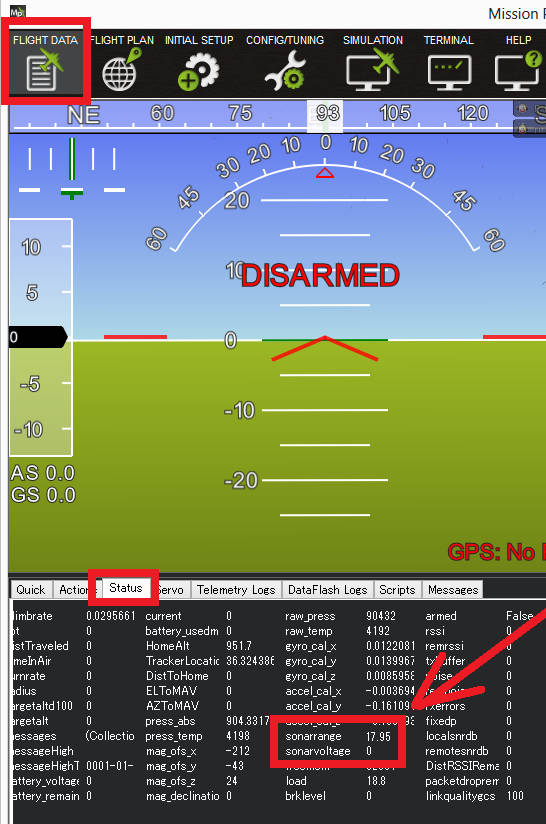
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查看 "sonarrange"(声纳范围)。