LightWare SF10 和 SF11 激光雷达¶
"这款" Lightware SF10 和 SF11 系列激光测距仪特别轻便,可提供快速、准确的距离测量。虽然价格略高于其他测距仪,但开发团队成员在使用中取得了良好的效果。该系列包括多种型号: SF10/A (25m), SF10/B (50米)、SF10/C(100米)和 SF11/C (120m)

连接(飞行)控制器¶
下图显示了传感器的输出引脚和一条方便的彩色编码电缆(通常包括电缆或电缆线)。 在此查看规格),用于连接(飞行)控制器。 串行, I2C 和 模拟 但我们建议使用 串行 如果可能,尤其是使用 30 厘米或更长的电缆时。
提示
使用较长电缆时,建议使用串行连接
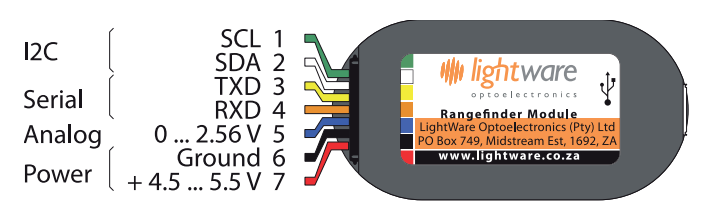
SF10 测距仪:输出引脚¶
用于 SF10 测距仪的主电缆¶
串行连接¶
对于串行连接,您可以使用任何备用 UART。将 UART 的 RX 线连接到激光雷达的 TX 线,再将 UART 的 TX 线连接到激光雷达的 RX 线。同时连接 GND 和 5V 线路。您不需要流量控制引脚。
下图显示了如何连接 SERIAL4。
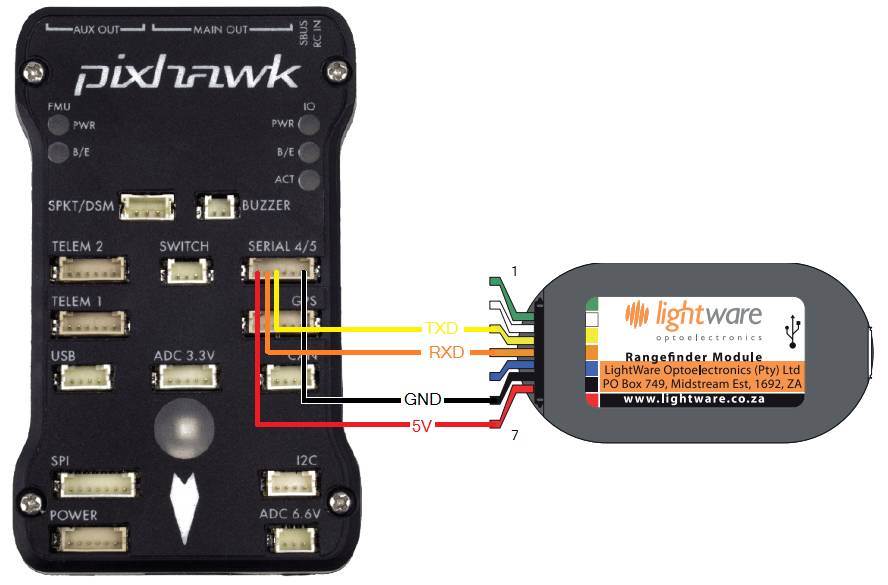
Pixhawk 和 SF10测距仪:串行连接 (SERIAL4)¶
然后需要设置串行端口和测距仪参数。如果您使用了 Pixhawk 上的 SERIAL4/5 端口,那么在第一个测距仪的情况下,您需要设置以下参数(这在 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
serial4_protocol = 9(激光雷达)
SERIAL4_BAUD = 115(115200 波特)
RNGFND1_TYPE = 8 (LightWareSerial)
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 2500 (用于 SF10A)、 5000 (用于 SF10B)、 10000 (用于 SF10C)或 12000 (用于 SF11C)。 这是测距仪能够可靠读取的距离(厘米)。该值取决于激光雷达的型号。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
如果您使用的是 Pixhawk 上的 Telem2 端口,则应设置为 serial2_protocol = 9,以及 SERIAL2_BAUD = 115
2018 年 5 月之前生产的 Lightware 激光雷达默认波特率为 19200。如果您的设备是在此日期之前生产的,则需要将波特率设置为 19200(参数值 19)。或者,您也可以使用 Lightware 终端应用程序重新配置 Lightware 设备,使用 115200 波特率,并使用上述设置。
I2C 连接¶
将激光雷达的 SDA 线连接到 Pixhawk I2C 端口的 SDA 线,将激光雷达的 SCL 线连接到 I2C 端口的 SCL 线。同时连接 GND 和 5V 线路。
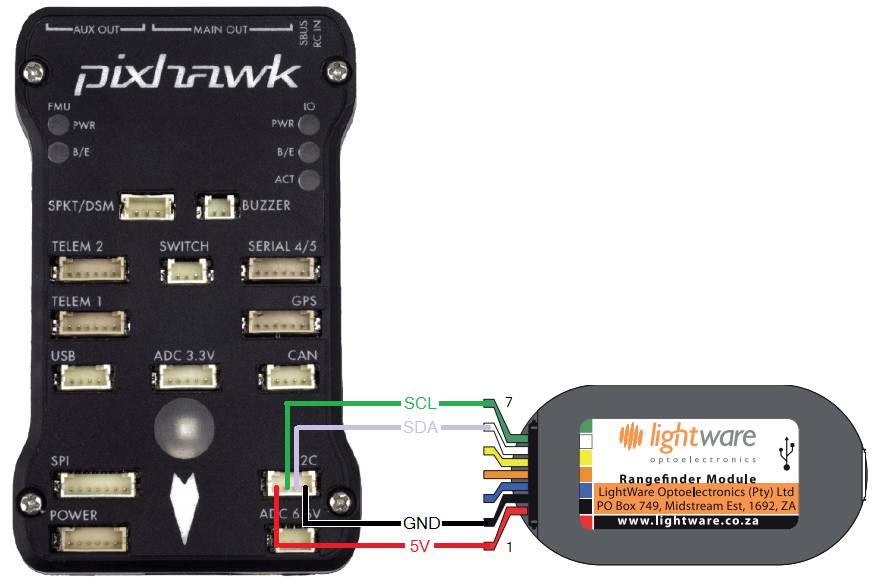
Pixhawk 和 SF10 测距仪:I2CConnection¶
然后,您需要如下图所示配置测距仪参数(在 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
RNGFND1_TYPE = 7(LightWareI2C)
RNGFND1_ADDR = 102(激光雷达的 I2C 地址,十进制)。 请注意,此设置为十进制,而不是激光雷达设置屏幕中显示的十六进制。默认地址为 0x66,十进制为 102。
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 2500 (用于 SF10A)、 5000 (用于 SF10B)、 10000 (用于 SF10C)或 12000 (用于 SF11C)。 这是测距仪能够可靠读取的距离(厘米)。该值取决于激光雷达的型号。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
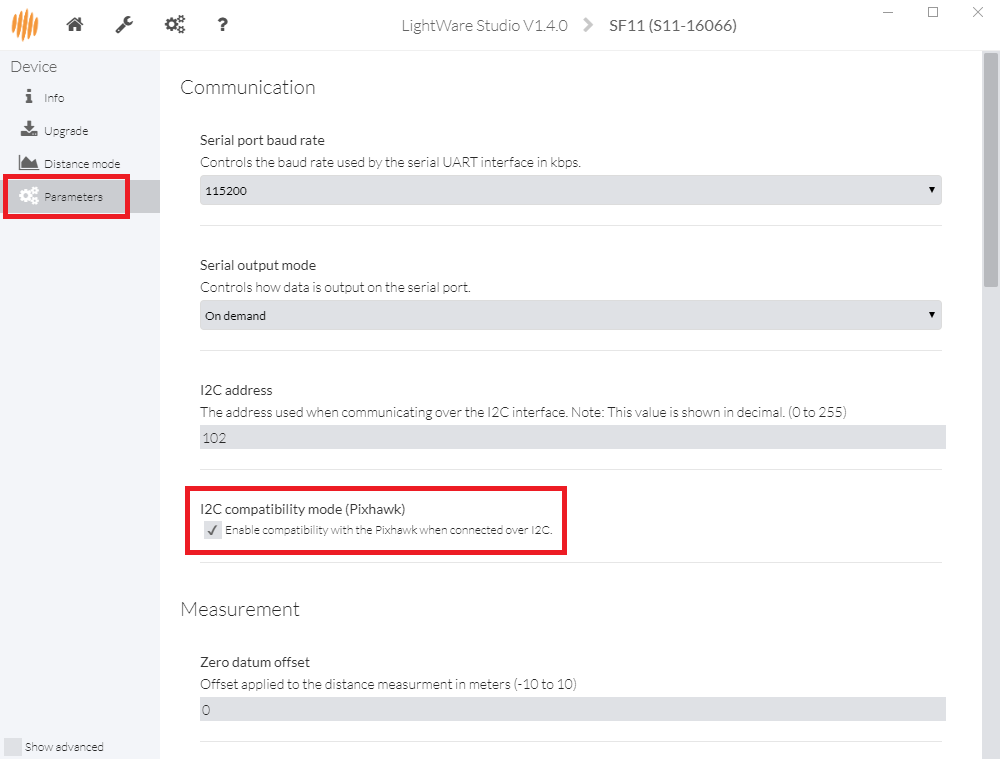
可能需要启用传感器的 "I2C 兼容模式 (Pixhawk)"。具体方法是使用 USB 电缆将激光雷达连接到电脑,然后下载 照明工作室连接并选中下图所示的复选框
警告
旧版 LightWare 测距仪的默认 I2C 地址为 85(十六进制 0x55)。为了防止与 ArduPilot 上的其他设备发生冲突,对该地址进行了更改。请检查测距仪系统设置以确定 I2C 地址。
模拟连接¶
SF10 的模拟输出引脚 (5) 应连接至 Pixhawk 的 3.3V ADC(模数转换器)。Pixhawk 将使用 ADC 连接器的 5V 和 GND 引脚提供传感器所需的稳压 5V 电源。
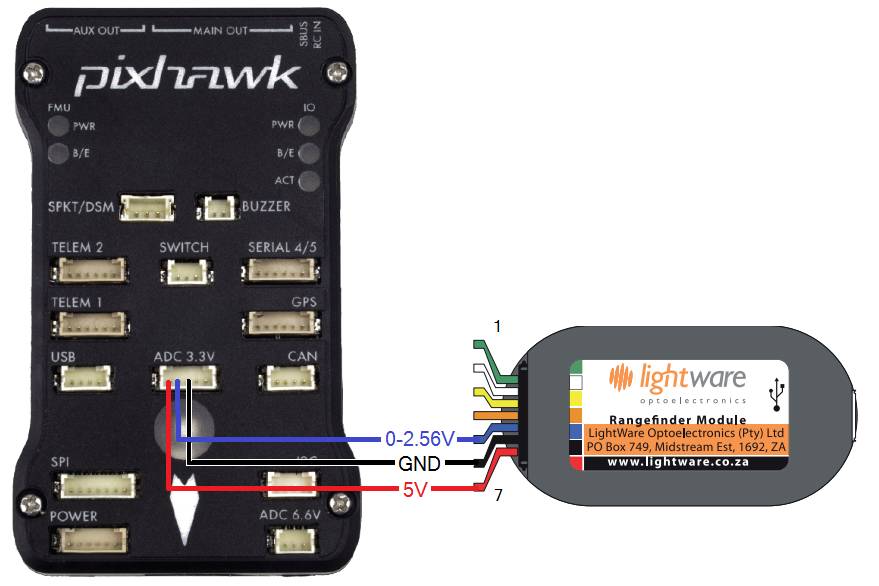
Pixhawk 和 SF10 测距仪:模拟连接¶
然后,您需要设置 ADC 和测距仪参数,如下图所示(设置在 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
RNGFND1_TYPE = 1(模拟)
RNGFND1_PIN = 14(3.3V ADC 连接器的第 2 个引脚)
rngfnd1_scaling = 9.76 (用于 SF10A)、 19.531 (用于 SF10B)、 39.06 (用于 SF10C)、 46.87 (用于 SF11C)
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 2000 (用于 SF10A)、 4500 (用于 SF10B)、 9500 (用于 SF10C)或 11500 (用于 SF11C)。 这是测距仪能够可靠读取的距离(厘米)。该值取决于激光雷达的型号。请注意,该距离比使用串行或 I2C 协议的距离短 5 米,因此可以可靠地检测到超出范围的情况。
rngfnd1_gndclear = 10 或更准确地说是载具着陆时测距仪到地面的距离(厘米)。该值取决于您安装测距仪的方式。
"这款" rngfnd1_scaling 值取决于测距仪输出引脚在最大测距时的电压。默认情况下,SF10/B 将在 50 米处输出 2.56V 电压,因此缩放系数为 50 米 / 2.56v ≈ 19.53(每种测距仪的模拟测距范围可在 "测距仪 "选项卡中找到)。 SF10 手册).手册说明了如何确认和更改最大输出范围/电压。
提示
我们强烈建议您调整 rngfnd1_scaling 将输出值与已知距离进行比较。
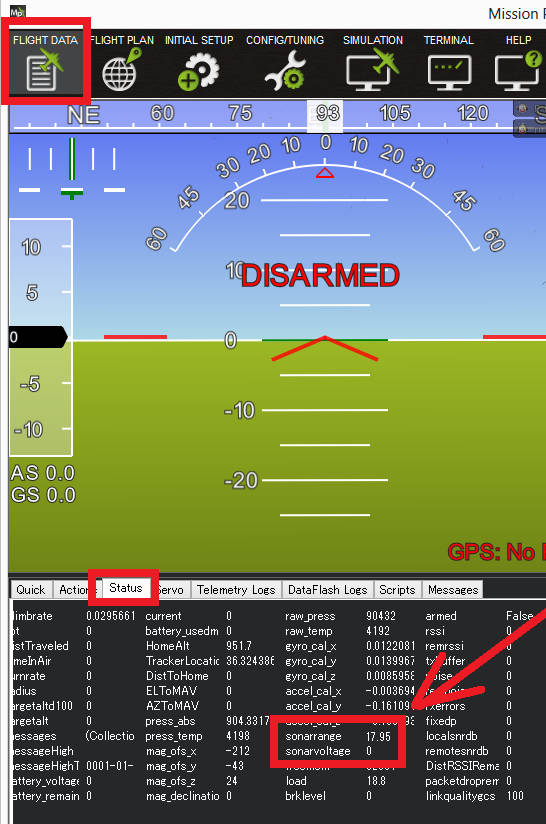
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。仔细查看 "sonarrange"(声纳范围)。