使用命令行界面配置 Copter¶
警告
CLI 正在所有平台上逐步淘汰。AC3.1.5 大幅削减了 CLI 功能,AC3.2 则完全取消了 APM2 的 CLI 功能。现在,所有 CLI 功能均可通过 GCS 中的常规 MAVLink 命令实现。本文已被移至开发维基,可能被视为过时文章。
您不需要使用Mission Planner地面站来设置 Copter(Mission Planner地面站中也有一些高级配置选项)。您还可以通过串行终端使用 APM 内置的命令行解释器 (CLI),它可以在任何计算机和操作系统上运行。它只能通过 USB 电缆使用,不能通过 Xbee/3DR 无线连接使用。
您还需要使用 CLI 来实现一些功能,例如为遥控发射机的拨动开关分配您喜欢的飞行模式。请参阅下面的菜单说明。
在Mission Planner地面站终端屏幕上按三次 "回车键 "即可进入 CLI。
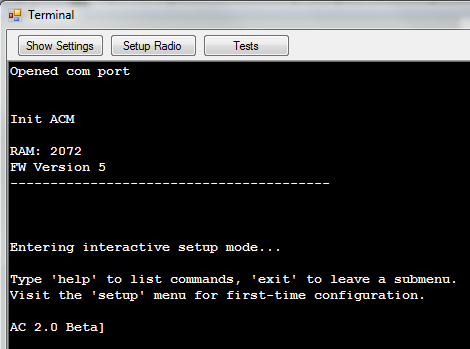
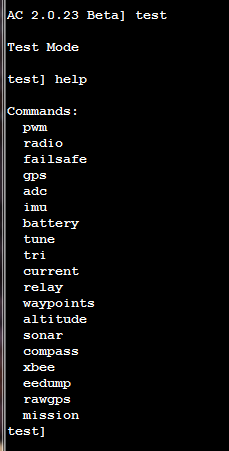
打开后,它将显示如下内容(显示软件的最新版本号):
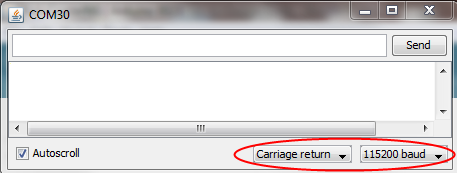
如果不使用 Windows,也可以使用 Arduino 内置的串行监视器(请记住选择正确的波特率并启用 CR,如图所示):
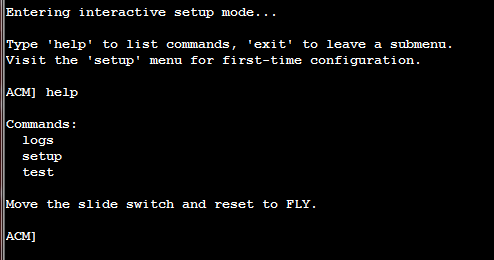
进入 CLI 后,您可以在任何菜单下键入 "help"(帮助),获得可用命令的完整列表。
有三个顶级菜单:设置、测试和日志。
每个菜单都有子菜单,在该部分输入 "help "也可查看其命令。
设置菜单¶
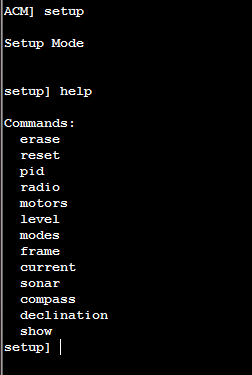
CLI 交互式设置 - 您必须查看每个项目,并设置与硬件相匹配的值
测试菜单¶
日志菜单¶
使用Mission Planner地面站阅读和分析日志¶
下载和分析日志文件的最简单方法是使用Mission Planner地面站,它可以让您绘制数据图表、为谷歌地球生成 KML 文件,并以其他方式灵活管理数据。
通过 CLI 阅读日志¶
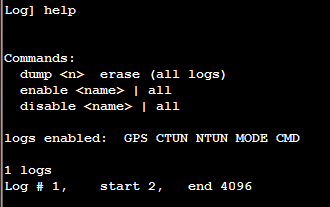
您也可以使用 CLI 下载数据文件。输入 原木 并点击回车键。以下是可用的命令:
"转储 *n*":转储日志编号 n.
"转储 0":转存并清除所有日志。
"擦除":删除所有日志。
"启用 *name*":启用日志记录 名字.使用 "全部 "可启用所有功能。
"禁用 *name*":禁用日志记录 名字.使用 "全部 "可禁用所有功能。
以下是可记录的字段名称,并显示了默认状态:
日志名称 |
默认值 |
功能 |
ATTITUDE_FAST |
禁用 |
以 50Hz 的频率将基本姿态信息记录到闪存中(占用更多空间) |
ATTITUDE_MED |
禁用 |
以 10Hz 的频率将基本姿态信息记录到闪存中(比 LOG_ATTITUDE_FAST 占用更少空间)。 |
全球定位系统 |
已启用 |
以 10Hz 的频率将 GPS 信息记录到闪存中。 |
下午 |
禁用 |
每 20 秒记录一次 IMU 性能监控信息。 |
CTUN |
已启用 |
以 10 Hz 频率记录控制环路调整信息。这些信息对调整伺服控制回路增益值非常有用。 |
NTUN |
已启用 |
以 10 Hz 频率记录导航调整信息。这些信息对调整导航控制环路增益值非常有用。 |
模式 |
禁用 |
记录飞行模式发生的更改。 |
RAW |
禁用 |
以 50 Hz 频率记录原始加速度计和陀螺仪数据(占用更多空间)。 |
CMD |
已启用 |
处理新命令时记录日志。 |
当前 |
禁用 |
如果已连接并启用,则记录当前传感器 |
发动机 |
禁用 |
记录电机指令 |