使用命令行界面¶
警告
CLI 正在所有平台上逐步淘汰。AC3.1.5 大幅削减了 CLI 功能,AC3.2 则完全取消了 APM2 的 CLI 功能。现在,所有 CLI 功能均可通过 GCS 中的常规 MAVLink 命令实现。本文已被移至开发维基,可能被视为过时文章。
将所有 cli 信息移至本页
ALSO 飞行任务刨床终端
概述¶
命令行界面(CLI)是配置器的替代工具。它能实现配置器的大部分功能,但使用的是文本界面。使用命令行界面的一个原因是,你可能无法运行配置器(例如,如果你运行的是 Linux 或没有 Windows 模拟器的 Mac)。还有一些命令只有 CLI 才能使用)。
使用 CLI 的方法是将 IMU 板上的滑动开关滑向伺服连接器。
飞行前,别忘了把它放回另一个位置!
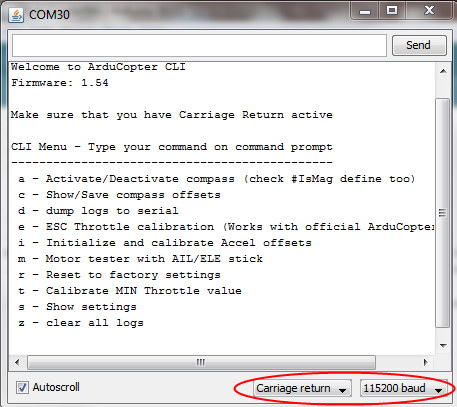
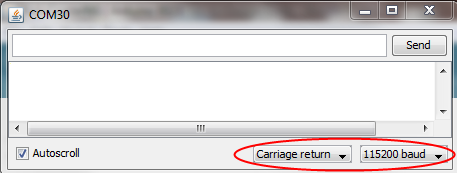
现在打开 Arduino 串行监视器,将波特率设置为 115200 波特,并确保启用 "回车"。你应该在监视器上看到一条命令行:
可用命令¶
当前 CLI 支持的命令有
a - 激活/禁用指南针
每一秒钟,'a'都会激活/禁用程序中的指南针用法。您还需要检查程序中是否选择了 #define IsMAG
c - 指南针偏移校准
在各个方向上滚动/前平移/俯仰/移动/摇摆/扭转您的四轴飞行器,甚至倒置,直到偏移数字不再变化。数值符合要求后,点击 "回车键 "保存数值并返回主菜单。
e - ESC 最大节流阀校准
Official Copter 电调(以及其他一些电调,您可以进行测试)支持最大/最小油门自动校准。
安全!首先断开螺旋桨!
激活校准
断开电池,但保持 USB 电缆连接
将油门杆移到 "全速 "位置
连接电池,聆听正常的电调 "哔哔 "声。
电调发出 "哔哔 "声后,将油门调至最小
聆听电调发出的最后提示音
给 APM:Copter 加小油门,查看所有电机是否以相同速度旋转
如果它们不旋转,则重新进行校准
点击 "回车键 "解除所有电机并退出 ESC 校准
如果您没有使用官方的 APM:Copter 电调,您可以将每个电调连接到遥控接收机的通道 3 输出,逐个手动校准。拔下电池,将发射机油门杆调至满,然后重新连接电池。等待蜂鸣声停止,然后再次将油门杆调至最小值。对所有四个电调重复上述步骤。
i - 初始化和校准加速度偏置
将 APM:Copter 放置在水平面上,并用此命令重置其 0-Level。采集样本需要几秒钟的时间。校准期间,请勿触摸/移动或以任何其他方式使 APM:Copter 移动。
m - 带 AIL/ELE 棒的电机测试仪
用户可以轻松测试电调/电机连接是否正确。将 AIL/ELE 摇杆移至上/下/左/右,相应的电机应开始缓慢脉动。正确的电机旋转方向如图所示 这里.
安全!测试前请断开螺旋桨。
如果您的电机不跟随您的摇杆输入,例如:摇杆向右和向左全速启动电机,请更换电源分配器 PCB 上的电调电缆或 APM 连接器中的电调电缆,具体取决于您连接电调的位置。
r - 重置出厂设置
每进行一次新的修订,都需要重置我们的 EEPROM(以防万一)。
t - 校准最小节流值
从无线电中读取最小节流阀值。将节流阀置于最小值并启动该测试,所有高度保持功能和一般发动机操作都需要最小节流阀值。
s - 显示设置
将最重要的设置打印到串行端口。
要正常使用 CLI 为飞行做好准备,您需要经过几个步骤。
用Mission Planner地面站或 Arduino 上传代码。
在终端屏幕上,如果没有自动显示 CLI 输入提示,请在启动时按三次 "回车键"。
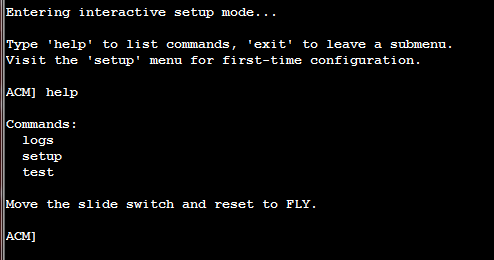
CLI 有三个菜单,您可以随时输入 "help"(帮助)查看可用的菜单或命令。输入 "setup "可进入设置菜单。
测试菜单命令¶
输入 "test"(测试),从顶部菜单进入测试菜单
输入 "radio"(无线电)查看无线电数值的输出。将滚动/俯仰摇杆移至右下方,查找 4500、4500(或接近该值)。偏航为-4500(左)和 4500(右)。
就是这样。你应该准备好飞行了。
AC2CLI
使用命令行解释器 (CLI) 配置 APM:Copter¶
您不需要使用Mission Planner地面站来设置 APM:Copter(还有一些Mission Planner地面站未涵盖的高级配置选项)。您还可以通过串行终端使用 APM 的内置命令行解释器 (CLI),它可以在任何计算机和操作系统上运行。它只能通过 USB 电缆使用,不能通过 Xbee/3DR 无线连接使用。
您还需要使用 CLI 来实现一些功能,例如为遥控发射机的拨动开关分配您喜欢的飞行模式。请参阅下面的菜单说明。
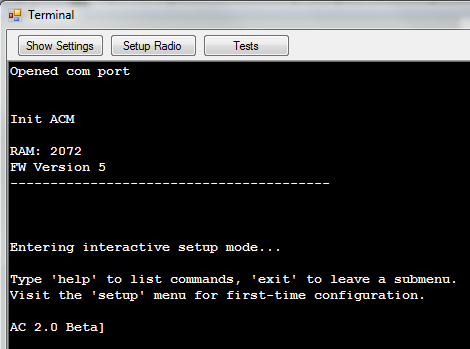
在Mission Planner地面站终端屏幕上按三次 "回车键 "即可进入 CLI。
打开后,它将显示如下内容(显示软件的最新版本号):
如果不使用 Windows,也可以使用 Arduino 内置的串行监视器(请记住选择正确的波特率并启用 CR,如图所示):
进入 CLI 后,您可以在任何菜单下键入 "help"(帮助),获得可用命令的完整列表。
有三个顶级菜单:设置、测试和日志。
每个菜单都有子菜单,在该部分输入 "help "也可查看其命令。
设置菜单¶
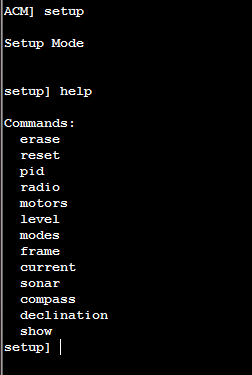
CLI 交互式设置 - 您必须查看每个项目,并设置与硬件相匹配的值
"设置 "菜单:命令:¶
擦除:首次安装 ACM 时,运行此程序以清除 EEPROM 中的错误值,以防万一!
重置:执行出厂重置和 EEPROM 值初始化
收音机:记录所有无线电频道的极限值 - 非常重要!!!
电机:对电调和电机进行交互式设置。进入该模式,然后插入电池,向各个方向移动遥控发射机的俯仰/滚动杆,使该方向的螺旋桨旋转(因此,向上移动杆将使四旋翼的前旋翼旋转,向右移动杆将使右旋翼旋转)。对于有四个以上马达的旋翼飞行器,它将使各组马达旋转,其中最靠近摇杆方向的马达转得最快。
夷为平地:设置加速度计的初始值 - 保持飞行器水平
模式:设置分配给每个开关位置的飞行模式(有 5 种可用模式)。使用遥控发射机上的副翼/摇杆滚动选项。右键全速前进,左键全速后退。点击回车键保存设置并退出该模式。
画框:设置帧配置:(x, +, v (Octo))
当前:启用 AttoPilot 电流传感器:(开、关、毫安小时)
声呐:启用声纳传感器。传感器连接到模拟输入(开、关)的 "pitot "端口。参见安装详情 这里.
指北针:启用指南针(开、关)
偏角:设置本地偏角值 - 在线查询准确度(十进制度数)
展览:所有设置的格式化输出
测试菜单¶
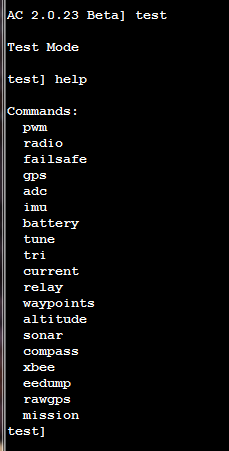
"测试 "菜单命令:¶
pwm:输出全部 8 个无线电通道的 pwm 值
收音机:输出所有 8 个无线电通道的控制值,单位为度 x 100 或其他值(参见 radio.pde)。
故障安全:(目前未使用)
骘:让您通过终端调试输出来测试稳定性(可能会使螺旋桨旋转--不建议用于飞行)。
全球定位系统:输出 GPS 数据。注意:通常必须在户外才能获得 GPS 锁定。首次开机可能需要两分钟或更长时间才能锁定。
adc:输出原始 adc 值
伊木:输出欧拉角
电池:以 0-3 模拟量输出电压读数
曲调:(目前未使用)
当前:从 AttoPilot 电流传感器输出电压和电流。电机会旋转,因此请断开四线电缆或取下螺旋桨!
接力:切换继电器
航点:转存存储的航点命令
高度:显示机载气压传感器的输出结果
声呐:显示声纳传感器的输出(如果已连接并启用)。
指北针:以度数为单位输出指南针角度(0 = 北)
xbee:输出用于测距的 XBEE 序列
电子转储:EEPROM 中字节的原始输出
rawgps:输出未解析的原始 GPS 数据
使命:将默认任务写入 EEPROM(空,"wp")。选择 "wp "选项将把飞行器向北飞 15 米,然后再返回。
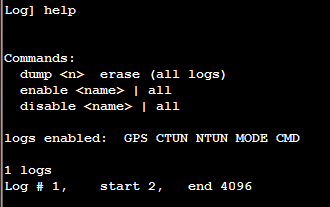
日志菜单¶