基本飞行稳定调整¶
备注
本页已被取代,现已存档
本主题包括基本的滚轴、螺距和油门飞行稳定调整。
概述¶
第一次飞行后,您可能会发现您的飞行器对控制输入的反应不尽如人意,或者您可能难以保持对飞行器的控制。如果您熟悉 PID 控制器,请查看 高级调整指南.如果您是一名经验丰富的操作员,请尝试 自动调整功能.本页将介绍Mission Planner地面站和 APM 计划器的基本调整部分,该部分将复杂的调整过程简化为几个简单的滑块。这是新操作员的最佳调整方法。
滚动和音高调整¶
最简单的飞行稳定调整方法是在现场使用 遥测无线电.带着以下问题进行初始飞行:
旋翼飞行器对滚动和俯仰的反应如何?反应是否比您想要的迟钝或抽搐?
当旋翼飞行器悬停时,油门设置在什么水平?是悬停在操纵杆的中间位置,还是高于或低于中间位置?
提高油门时,旋翼飞行器的加速度是多少?它的增高速度是比你想要的慢还是快?
将遥测无线电地面模块连接到地面站计算机,然后打开 Mission Planner 或 APM Planner。选择正确的 COM 端口并选择连接。您应该可以在 "飞行数据 "屏幕上看到实时数据。要开始飞行稳定调整,请选择配置/飞行稳定调整和基本飞行稳定调整。
从页面顶部的 "滚动/前平移/俯仰 "滑块开始。如果观察到您的飞行器对滚动和俯仰控制的反应过于急躁,则将滑块向左移动一个刻度线;如果观察到您的飞行器过于迟缓,则将滑块向右移动一个刻度线。重复飞行以确定更改是否有益。重复上述过程,直到您对旋翼飞行器的滚动和俯仰响应方式感到满意为止。
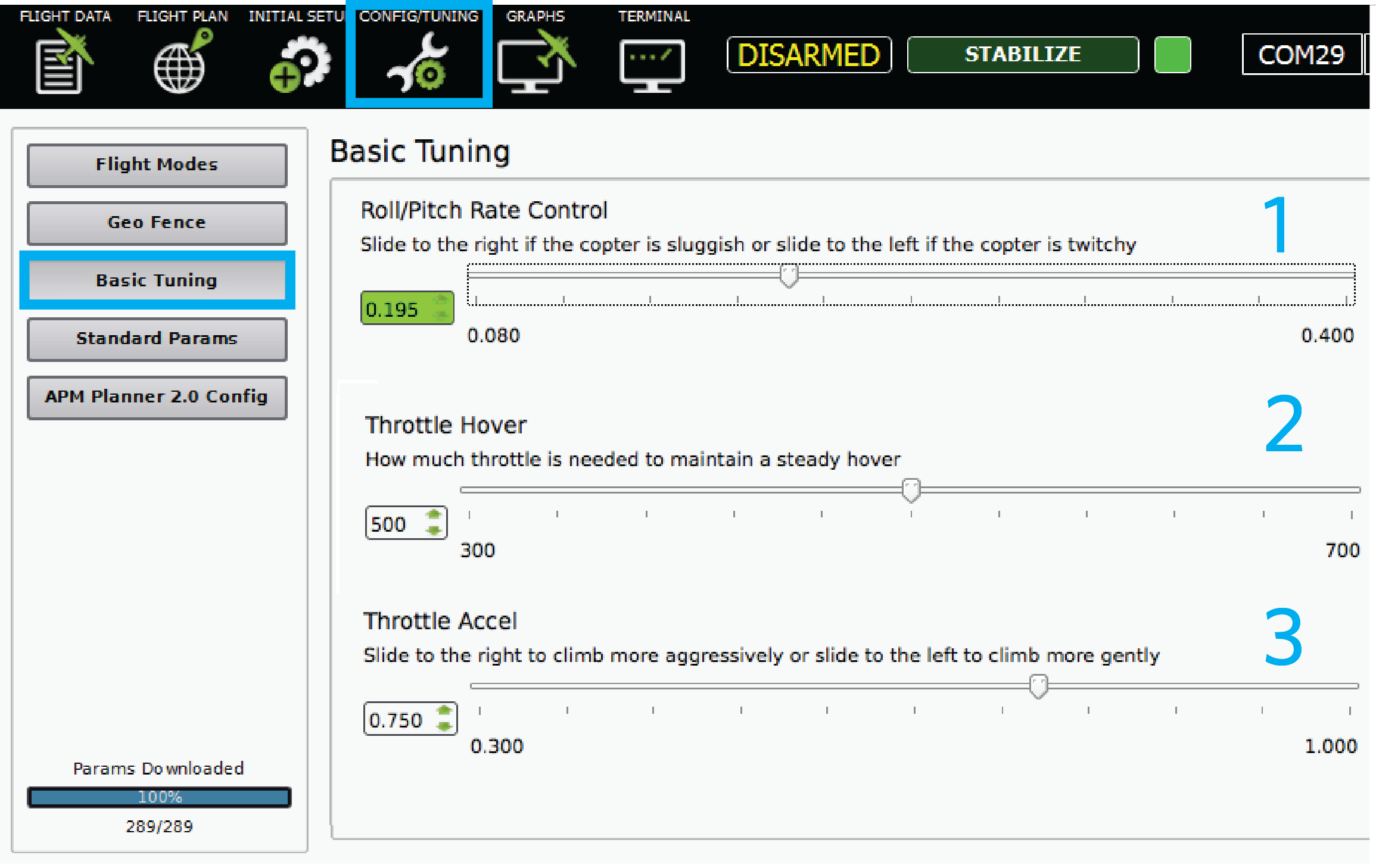
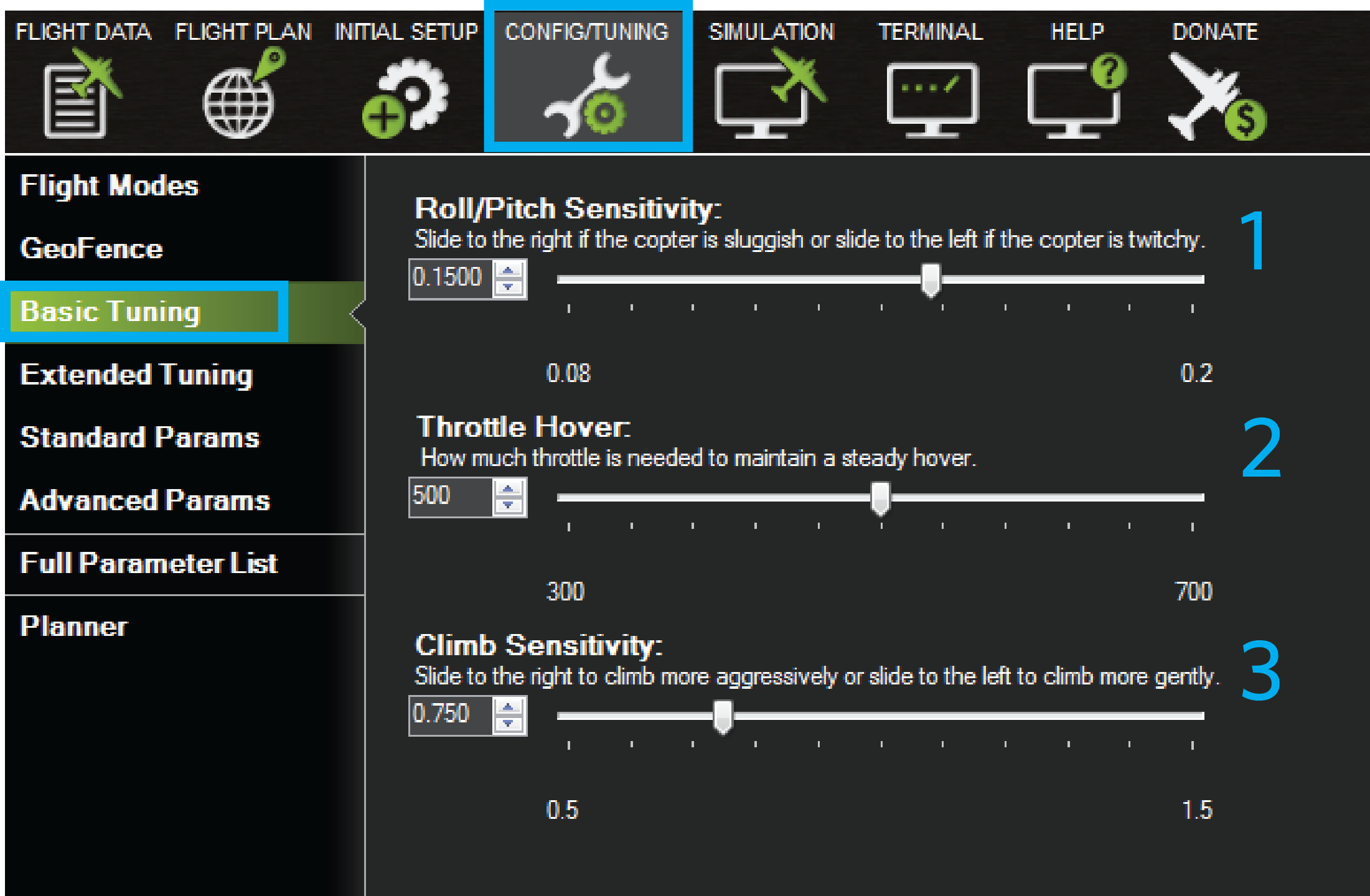
节气门调整¶
底部的两个滑块可以调整油门控制。调整标有 "油门悬停 "的滑块,直到旋翼飞行器悬停在油门杆的中间位置。如果旋翼飞行器悬停时油门杆高于中间位置,则将滑块向左移动一个刻度线,直到悬停在油门杆中间位置,边移动边测试。如果飞行器悬停时油门杆低于中间位置,则向右移动滑块,每移动一个刻度线,直到它悬停为止。确保边做边测试每一组调整设置。
向右移动 "油门加速 "或 "爬升灵敏度 "滑块,可使飞行器更积极地提升高度;向左移动滑块,可使飞行器更平缓地提升高度。设置后测试每个增量,以评估调整效果。