归档:PX4FMU 简要介绍¶
警告
存档
PX4FMU (v1)已经报废,一般无法购买。本文供现有用户使用。
本页概述了 Pixhawk 飞行管理装置。
Pixhawk(FMUv2)和 PX4FMU(FMUv1)¶
Pixhawk (FMUv2) 单板(飞行)控制器由最初的 "PX4 系统 "演变而来,该系统由 PX4FMU 和包括 PX4IO 和 PX4IOAR 在内的各种附加板组成。
Pixhawk 集成了几项附加功能,为我们的 ArduPilot 飞行系统提供了扩展功能。
Pixhawk 的连接器图如下所示,但 请访问此链接了解 Pixhawk 的全部信息
PX4FMU/PX4IO (FMUv1) 飞行管理系统包括¶
PX4-FMU (飞行管理单元)。
功能强大的 Cortex M4F 微控制器和闪存用于控制飞行和通信。
一个用于插入 SD 存储卡的插口。
用于确定方向的 3 轴陀螺仪。
3 轴加速度计用于确定外部影响。
罗盘(磁力计)。
用于确定海拔高度的气压传感器。
用于连接外部安装的 UBLOX LEA GPS,以确定绝对位置。
可堆叠的电路板互连装置,用于添加各种外围电路板。
用于 USB、JTAG 和串行连接的通信接口。
PPM-SUM RC 无线电输入和伺服输出的连接。
PX4-IO (输入输出)电路板。
包含自己的板载微控制器,并与 FMU 堆叠。
直接输入电池供电。
8 路高速伺服 PWM 输出。
Futaba SBUS 或 PPM-SUM 串行伺服输出。
各种 PPM-SUM / SBUS 输入连接器。
两个用户可分配的继电器、两个 1/2 安培 5 伏输出和一个模拟输入端口。
PX4FLOW 智能(光学流量)相机。
专门的向下摄像模块,利用地面纹理和特征来确定飞机在地面上的运动。
PX4FLOW 配备了与 PX4FMU 相同的功能强大的 Cortex M4F 微控制器。
内置的微控制器可执行板载自动二分像素图像分析,以确定相对于地面的运动。
内置 3 轴陀螺仪可自动补偿飞机倾斜角度的变化。
PX4-IOAR Quad Carrier 是 Parrot AR.Drone 的专用接口板。
PX4FMU 电路板已预装好,可使用Mission Planner地面站为您的机身加载固件。
详细说明¶
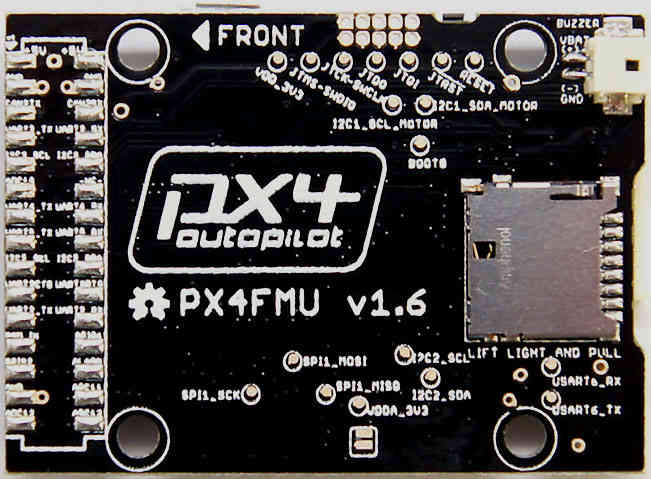
PX4FMU 电路板背面显示 SD 卡载体和蜂鸣器插座:
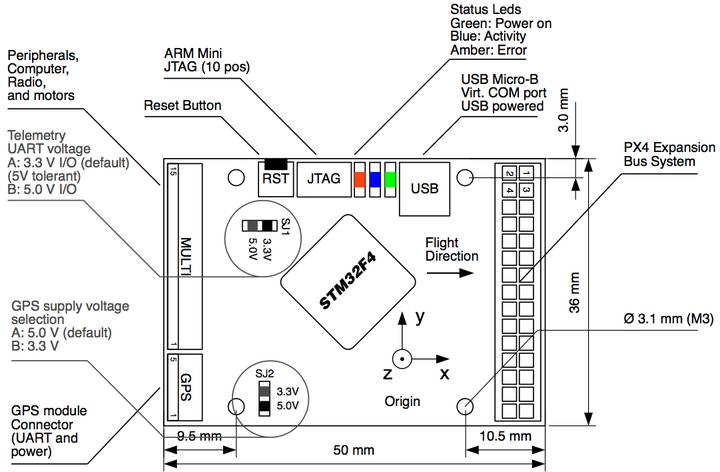
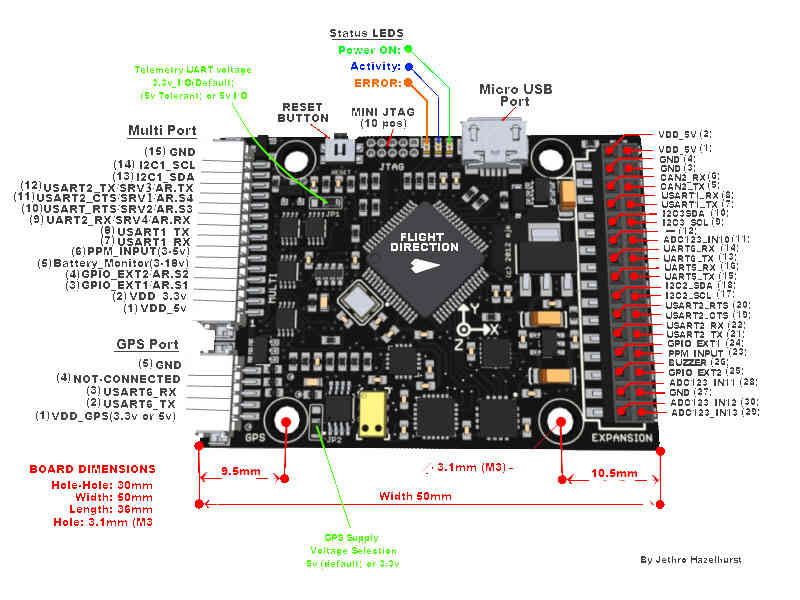
PX4FMU 连接器图¶
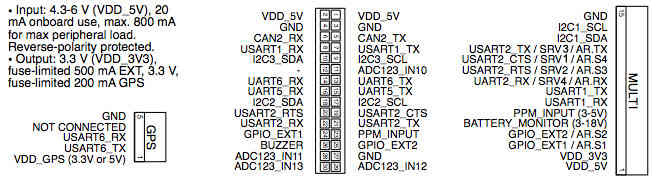
模拟和数字引脚¶
本节列出了 PX4FMU 上可用的引脚(模拟和数字)。
PX4v1 模拟输入¶
PX4FMUv1 有以下 "可用 "模拟输入端口引脚,可用于多种用途。
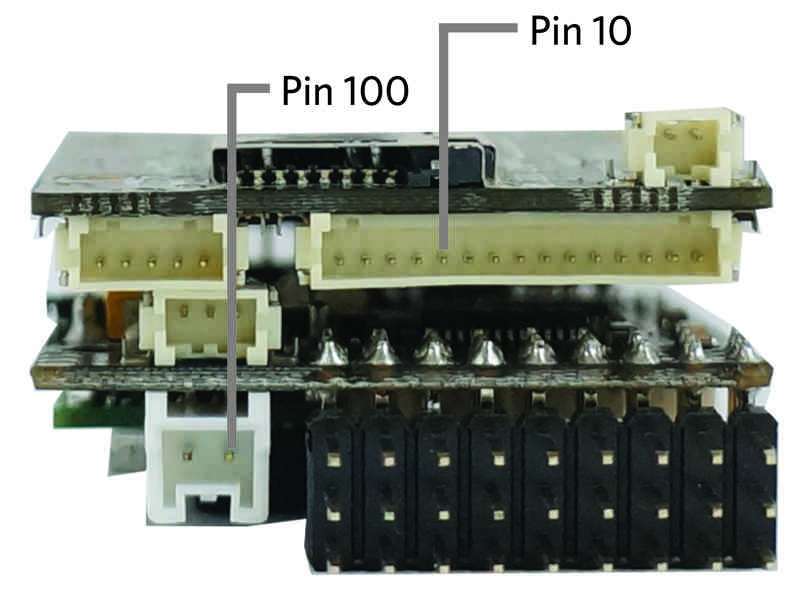
引脚 10 (高压模拟引脚):
FMU 电池电压通过 FMU 电路板末端 15 针多路连接器的第 5 针测量。它的比例为 5.7:1,可以测量高达 18.8V 的电压。
位于 PX4FMU 板的 DF13 15 针 "多路连接器 "的第 5 针上。
该引脚最高可接受 18.6 伏电压。(您可以增加一个电阻分压器,并为更高的电压设置适当的比例)。
当高级参数 VOLT_DIVIDER 设置为 1 时,可直接读取电压值。
对于旧版本,VOLT_DIVIDER 需要设置为 5.66,以便直接进行电压缩放。
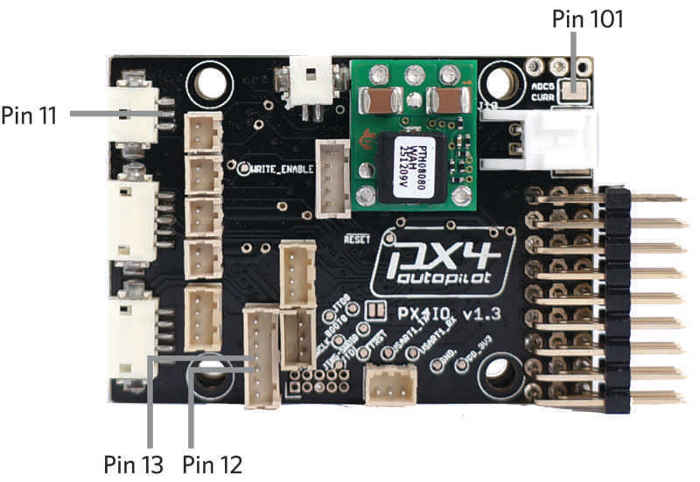
引脚 11 (模拟空速输入引脚)
位于 PX4IO 板上 3 针 "FMU-PRS "DF13 连接器的第 2 针上。
通常在平面上用于空速传感器,VCC 位于引脚 1,传感器位于引脚 2,接地位于引脚 3。
平面高级参数:ASPD_PIN 设置为 11。
该引脚直接连接到 PX4FMU 上的 ADC。
该引脚可接受高达 6.6 伏的电压(它有一个 2:1 比例的内部分压器)。
引脚 12 (模拟 2 输入)
位于 PX4IO 板上 "FMU-SPI "端口的第 3 针上。
常用于声纳
Copter and Rover 高级参数:SONAR_PIN 设置为 12
该引脚直接连接到 PX4FMU 上的 ADC。
该引脚最高可接受 3.3 伏电压。
引脚 13 (模拟 3 输入)
位于 PX4IO 板上 "FMU-SPI "端口的第 4 针上。
常用于双声纳安装中的声纳 2。
Rover 高级参数:SONAR2_PIN 设置为 13
该引脚直接连接到 PX4FMU 上的 ADC。
该引脚最高可接受 3.3 伏电压。
引脚 100 (通过 IO 板上的电源连接器测量电池电压。上限为 18V)。
虚拟模拟输入引脚,用于输入连接到 PX4IO 稳压器 6V 至 18V 输入端的电池电压。
这是 PX4IO 上用于锂电池监控的正常引脚。
如果使用该引脚,则将 VOLT_DIVIDER 设置为 1,以读取正确的电池电压读数。
虚拟 "针脚 "100 的输入仅来自 PX4IO 板上的电池电源输入插孔。
该 "销钉 "不会被拿出来供单独的用户访问。
该引脚与上述 PX4FMU 上的引脚 10 高压模拟引脚是分开的,后者也可用作电池电压监控器。
针脚 101:通过 IO 板上电源连接器旁边的引脚测量电池电流。
电池电流传感器的虚拟模拟输入引脚,与 PX4IO 电源连接器旁的 "电流 "引脚相连。
警告
- 您需要小心
使用电压不超过 3.3V 的电流传感器,因为该引脚上的电压过高会导致 PX4IO 复位。
与电流传感器一起使用时,在该引脚和地之间加一个 0.1uF 的电容器将有助于减少 "噪音"。
PX4v1 数字输出¶
PX4V1 数字输出引脚有两种类型,一种是接通时提供 5V 电压、断开时提供 0V 电压的引脚,另一种是 "继电器 "引脚,接通时提供低电阻、断开时提供高电阻。
引脚 111:FMU 继电器引脚 1
引脚 112:FMU 继电器引脚 2
引脚 113:IO 继电器引脚 1
引脚 114:IO 继电器引脚 2
引脚 115:IO 数字附件引脚 1
引脚 116:IO 数字附件引脚 2
旋翼飞行器接线(图表和说明)¶
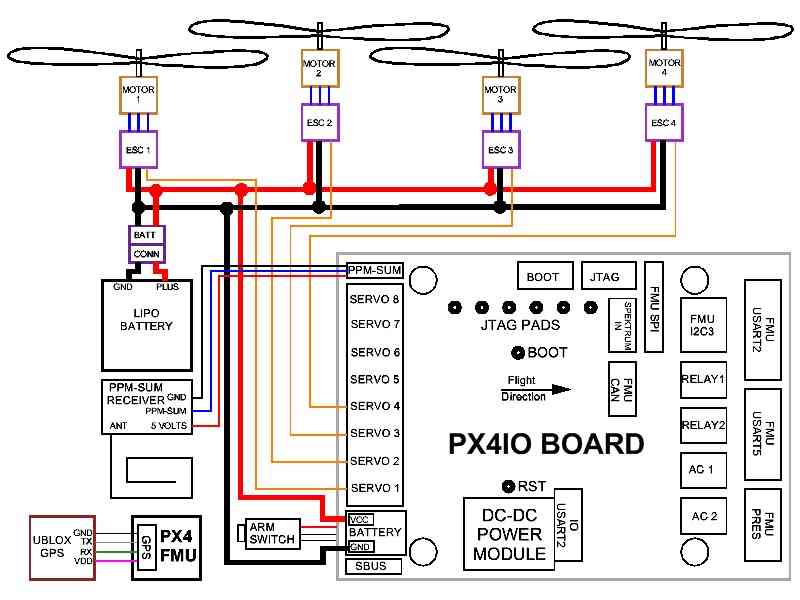
为 PX4-IO 电路板布线
PX4IO 板内置电源,最高可连接至 18 伏电压。
将带有黑色和红色导线的白色 PAP-02-VS 2 针连接器插入先前焊接在 PX4IO 板上的配套电源连接器。
电池正极是(红线),应焊接到电池红色电源线/连接器上。
蓄电池接地线为(黑线),应焊接到蓄电池的黑色蓄电池(接地)导线/连接器上。
电调的主电源输入也需要连接到这些电线和电池连接器。
也可以使用配电板。
将 PPM-Sum RC 接收器的 3 线电缆连接到离 PX4IO 电路板边缘最近的 9 x 3 角连接器的一端,信号线离电路板最远,接地线离电路板最近。
将 PX4FMU 电路板的伺服输出信号连接到电调控制输入端。
仅将信号线从电调连接至 PX4IO 板上的 3 x 9 伺服器连接器。
电机 1 的 PX4IO 板连接器位于连接器边缘,紧邻电池电源输入线。
根据您的旋翼飞行器类型,将 2 至 8 个电机的电机电调线(1、2、3、4 等)从该边缘依次插入。
您可以将电调信号线插入一个单线连接器,该连接器的针脚数量与您的旋翼飞行器相符。
电调信号线/连接器应插入 PX4IO 电路板 3 x 9 伺服连接器的最上面一行(离电路板最远)。
请注意,随 UBLOX GPS 塑料封套一起提供的电缆两端都有白色 6 针连接器,这不是 PX4FMU 板的正确电缆。
正确的较长 GPS 电缆装在一个单独的信封里,一端是 5 针 "米色 "连接器,另一端是 6 针白色连接器。
将正确的 GPS 电缆的白色 6 针连接器插入 GPS 的 6 针插座。
将米色 5 针连接器插入 PX4FMU 板的 5 针 GPS 插座,该插座紧邻 15 针 DF13 Mini 连接器。
将与蜂鸣器随附导线相连的 2 针连接器插入 PX4FMU 板上带有 SD 卡座一侧的蜂鸣器插座。
将 "上膛开关 "连接到 PX4IO 电路板上的上膛开关连接器,该连接器位于电路板与电池焊盘相反的一侧。