归档:在四旋翼飞行器上安装 PX4FMU¶
概述¶
材料清单:
Copter 固件 3.1 及更高版本仅支持 PX4 FMU 和 PX4 IO 板的组合系统;不再支持仅 FMU 的系统。从 3DRobotics LINK_BROKEN 购买 PX4 FMU 套件和 PX4 I/O 板 LINK_BROKEN
您可以使用与 PX4 的主 "Multi "连接器相匹配的专用电缆进行主接线,该电缆可从 3DRobotics LINK_BROKEN 购买。
如果您愿意,可以剪掉单针连接器,直接焊接到必要的位置,然后剪掉多余的导线。
使用随附的 4 个尼龙支座将 PX4FMU 安装到一块与 FMU 大小相同的废塑料或玻璃纤维板上。
用四块 3/4 英寸的 Kyosho Zeal 胶或双面泡沫胶带将电路板安装到旋翼飞行器上,以提供隔振效果。
将 PX4-FMU 板安装在 QuadCopter 顶部的中心位置。
PX4FMU 电路板通常将 SD 卡放在顶部。
有时,将 PX4FMU 的另一面朝上安装会更有利于 LED 的观察。
如果要将 PX4FMU 电路板的组件面朝上安装,则需要在Mission Planner地面站的高级参数列表中将 "电路板方向 (AHRS_ORIENTATION) "参数设置为 "滚动 180"。
标有 "FRONT "的箭头应朝向飞机前方(也是黑色大板互连连接器)。
如果使用上述建议的减震器,最好先在减震器顶部和 PX4 电路板下方套上一个小 O 形环,然后再用随附的螺母 "轻轻 "将其固定,以防止损坏电路板。
事实上,这些阻尼器可能无法提供足够的阻尼,您应该查看 Wiki 中有关振动控制的部分。
将 GPS 朝上安装,"视线 "不受天空阻挡.
全球定位系统可以安装在一个短立柱上,以提供最广泛的卫星接入。
使用 PPM-SUM 接收器的四旋翼飞行器仅 PX4-FMU 接线图¶
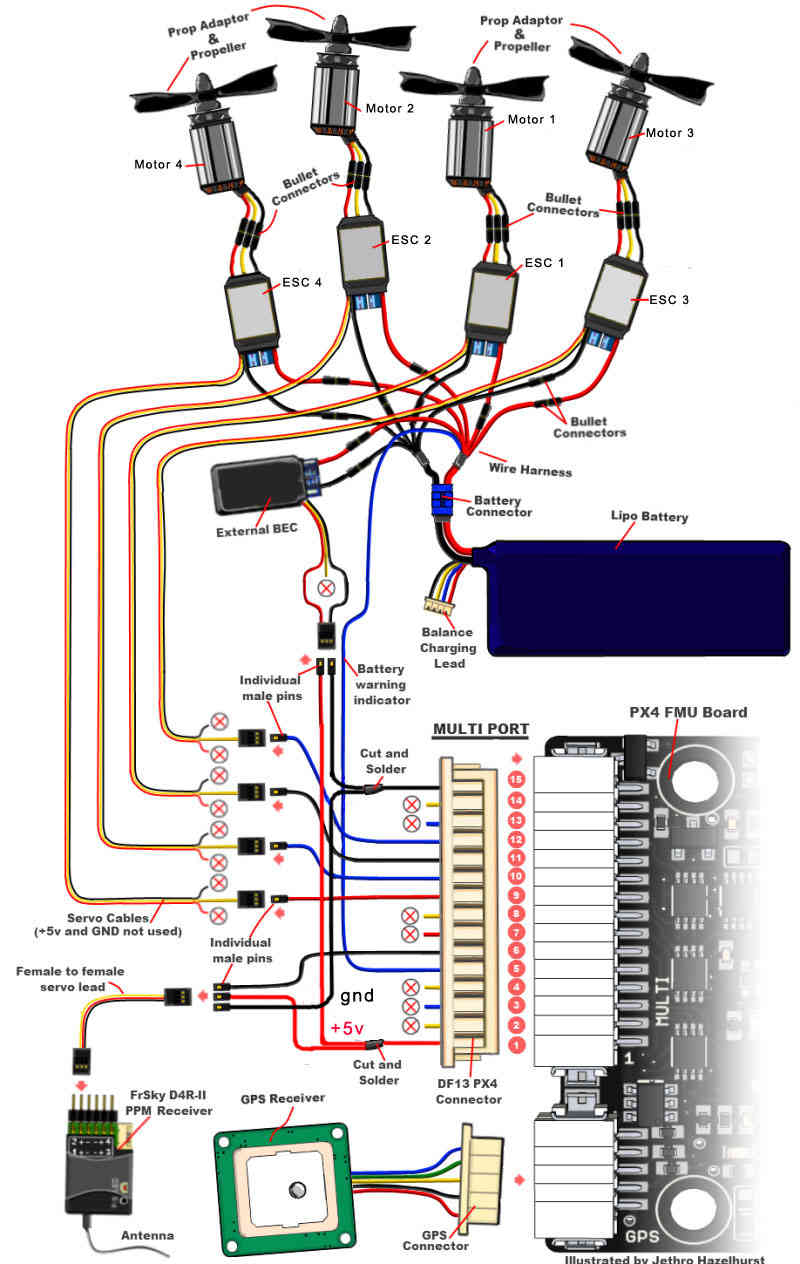
将 PX4FMU 电路板连接到您的四旋翼飞行器¶
使用粗线将电调的地线和电源线与电池连接器连接起来。
也可以使用配电板。
将 BEC(5 伏电源)电源输入引线与电池输入引线相连。
将 BEC 接地输出端连接至 PX4 的接地端(多路连接器第 15 针)。
将 BEC 电源输出端连接至 PX4 的电源输入端(多路连接器针脚 1)。
注意! 您可以将包含 BEC 的电调的电源线和地线(信号侧)连接到多路连接器的针脚 1 和 15 上,为 PX4 电路板供电,而无需如图所示安装单独的 BEC。
如上图所示,PPM-SUM 接收器可通过连接电缆接线。
或者将 15 针 DF13 "多路 "连接器上的 PPM-SUM 信号线、电源线和地线直接连接到 3 针伺服/接收器连接器上。
将 PPM-Sum RC 接收器的信号线连接至 PX4 板上多路连接器的第 6 针。
将 PPM-SUM RC 接收器的接地引线连接至 PX4 板上多路连接器的第 15 针。
将 PPM-SUM RC 接收器电源线连接至 PX4 板上多路连接器的 1 号针脚。
将 PX4FMU 板的 4 个伺服输出信号连接到电调控制输入端。
导线可以如图所示用连接器连接起来,也可以使用焊料和热缩管。
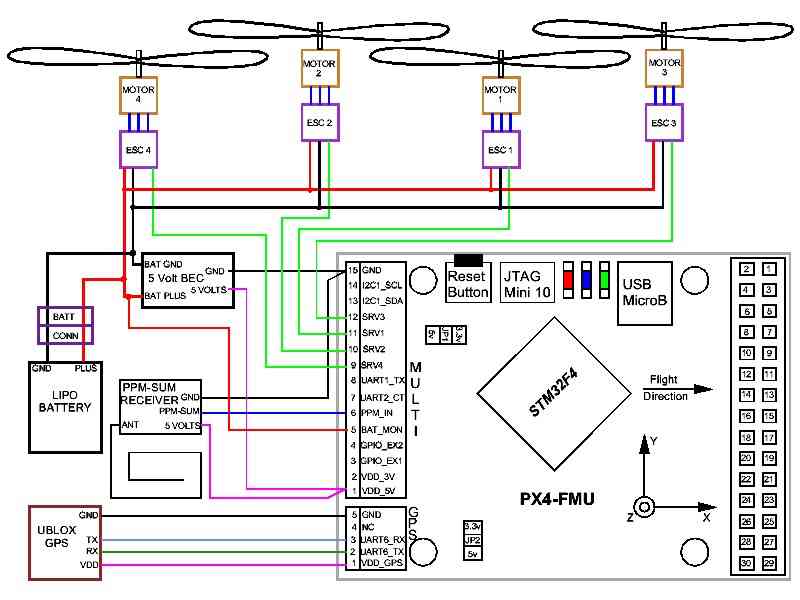
将 PX4FMU PWM 控制 4(多路连接器针脚 9)连接至电机 4 的电调信号输入端。
将 PX4FMU PWM 控制 2(多路连接器针脚 10)连接至电机 2 的电调信号输入端。
将 PX4FMU PWM 控制 1(多路连接器针脚 11)连接至电机 1 的电调信号输入端。
将 PX4FMU PWM 控制 3(多路连接器针脚 12)连接至电机 3 的电调信号输入端。
从 PX4FMU 的电池监控器连接处(多路连接器针脚 5)接一根导线到电池正极电源线。
请注意!随 UBLOX GPS 塑料封套一起提供的电缆两端都有白色 6 针连接器,但不是 PX4 的正确电缆。.
正确的长电缆装在一个单独的信封里,一端是 5 针 "米色 "连接器,另一端是 6 针白色连接器。
将正确的 GPS 电缆的白色 6 针连接器插入 GPS 的 6 针插座。
将米色 5 针连接器插入 PX4 的 5 针 GPS 插座,该插座位于 15 针 DF13 Mini 连接器旁边。
将与蜂鸣器随附导线相连的 2 针连接器插入 PX4FMU 板上带有 SD 卡座一侧的蜂鸣器插座。
在Mission Planner地面站的完整参数列表中,您需要设置 brd_safetyenable 参数为 0 = 关闭。
这是因为安全开关连接到 IO 板的板载微控制器,而 PX4FMU 没有开关。
使用 PPM-SUM 接收器的四旋翼飞行器仅 PX4-FMU 接线示意图¶
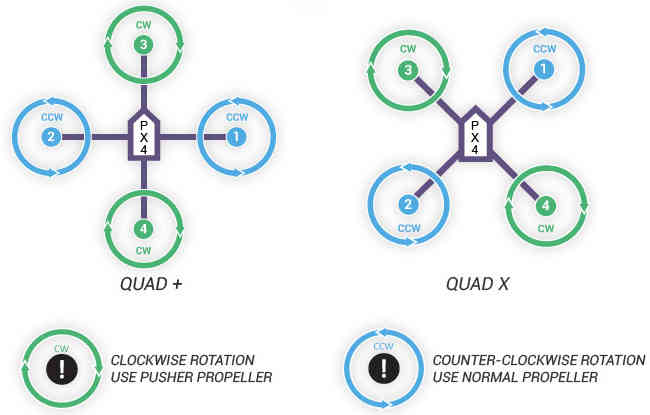
为 X 或 + 模式配置的电机布线¶
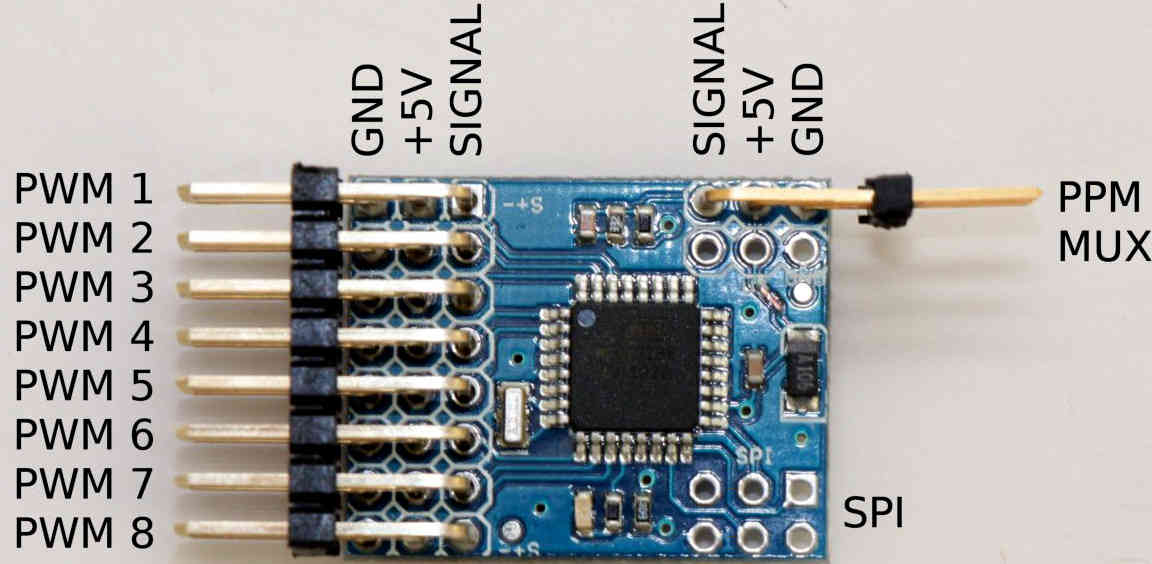
使用带有 8 通道 PPM 编码器的标准遥控无线电接收器¶
您可以使用带有 8 通道 PPM 编码器的标准无线电接收器来代替 PPM-SUM 接收器。
8 通道 PPM 编码器可从以下网站获取 这里的 jDrones.
将一个 3x8 直角连接器从顶部焊接到 8 通道 PPM 编码器电路板的一端。
将 3x8 连接器朝上并朝向远处,在 8 通道 PPM 编码器电路板的右边缘焊接一个 3x1 直角连接器。
用 5-8 个母头对母头伺服跳线将接收机的 5-8 个输出通道连接到 8 通道编码器的输入端(信号线离电路板最远)。
将编码器的 PPM-SUM 信号输出端连接至 PX4FMU 电路板的 PPM 和信号输入端(15 针多路连接器的第 6 针)。
将编码器的 PPM-SUM 接地输入连接至 PX4FMU 电路板的接地连接(15 针多路连接器的针脚 1)。
将编码器的 PPM-SUM 电源输入连接至 PX4FMU 电路板的电源连接(15 针多路连接器的第 15 针)。
3DRobotics 8 通道 PPM-Sum 编码器¶
有几种无线电系统直接支持 PPM-Sum 或 S-Bus¶

FRSky 发射器适配器模块和 PPM-Sum 接收器¶

FRSky PPM-Sum 兼容发射机¶

与 FRSky 发射器模块兼容的 Turnigy 发射器¶
