万向塔罗牌¶
存档 ......注意
"这款" 塔罗牌 T-2D 有 一直 a 流行 低 费用 2-轴线 有刷 万向. 虽然 此 实际 硬件 有 一直 退休 和 生产商 支持 停产, 此 页码 是 预定的 至 保持 向上 基本的 支持 对于 此 项目, 作为 好 作为 至 在职 作为 一个 图例 范例 的 如何 至 配置 ardupilot 万向 控制权 选项.

备注
以下说明建议使用 塔罗云台固件 v1.5
连接(飞行)控制器¶
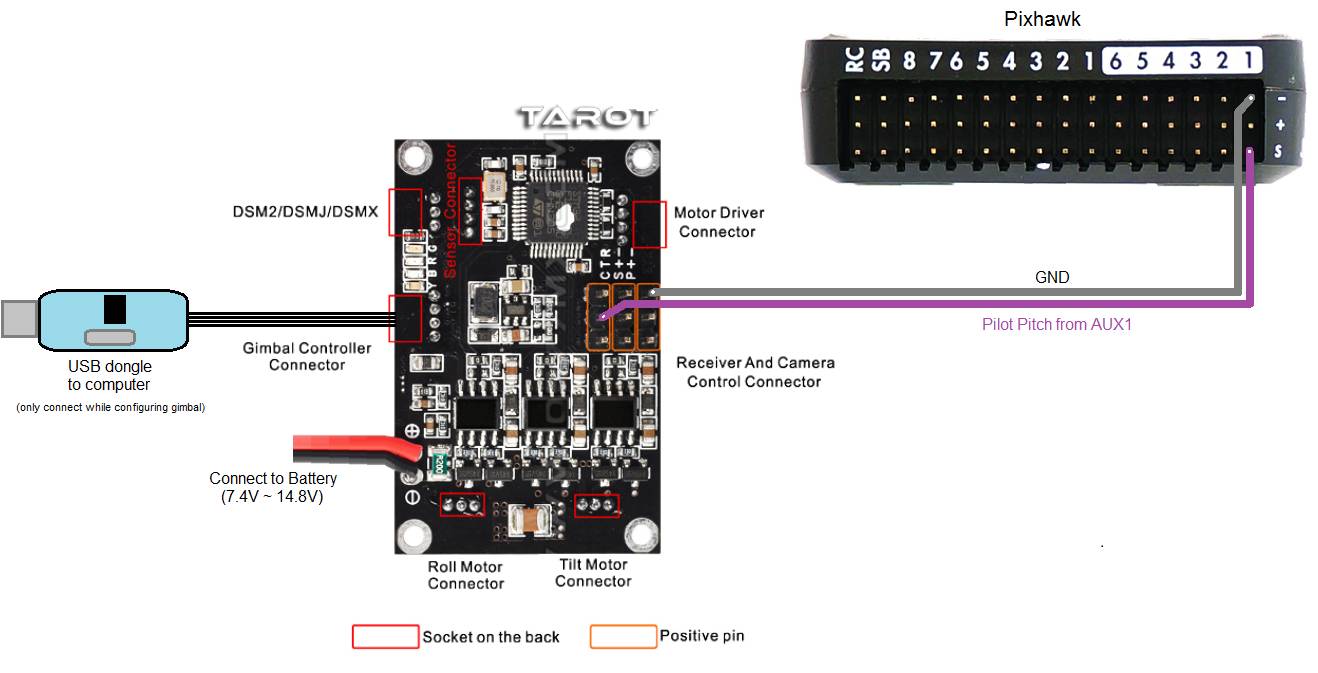
Tarot 云台的红色和黑色电源线应直接连接至 2S 或 3S 电池。如果您计划使用 4S(或更高)电池,请使用电压调节器以确保电压保持在安全操作范围内:直流 7.4 V - 14.8 V(建议使用 12 V)。3DR RTF Quad、Y6 和 X8 包括一个电压调节器,允许在 Tarot 云台上使用 4S 电池。
T "针脚应连接到 Pixhawk 的 AUX1 信号针脚上
两个"-"针脚中的一个应连接到 Pixhawk 的 AUX1 接地针脚上
运行¶
纸质说明书通常随万向节一起提供,但稍显过时的用户手册可在 塔罗云台固件 v1.5 压缩包 定义
载具通电后,云台在启动和校准时将显示黄色指示灯。在启动过程中,请勿触摸云台。当云台显示闪烁的蓝灯时,即表示已准备好飞行。如果云台未连接到(飞行)控制器,它将在没有(飞行)控制器控制的情况下执行基本的稳定操作,此时显示的是实心蓝灯。
LED 的含义
黄色固体 = 正在校准
蓝色闪烁 = 准备就绪,与(飞行)控制器连接
蓝色固体 = 准备就绪,未连接(飞行)控制器
配置云台¶
塔罗云台通常可以开箱即用,但如果您希望更改云台的内部配置:
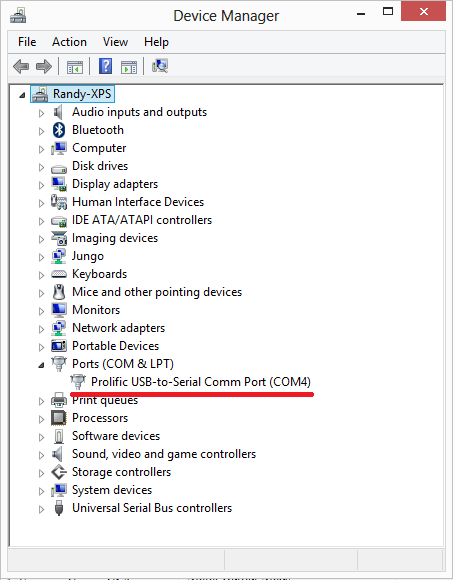
使用提供的 USB 加密狗将 Gimbal 板连接到计算机(仅限 Windows)。如果这是您第一次插入加密狗,您可能会看到一个 USB 设备安装窗口。成功安装驱动程序后,设备管理器中将出现一个名为 "Prolific USB-to-Serial Comm Port "的新 COM 端口,如下图所示。如果找不到驱动程序,可以使用 "设备管理器 "中 "驱动程序 "目录下的 .exe 文件安装 Windows 7 或 Windows XP 驱动程序。 塔罗云台固件 v1.5 压缩包 文件
备注
Windows 8 和 10 用户可能会发现 Prolific USB 转串口驱动程序无法启动的问题。这个问题显然可以通过以下方法解决 请按照该网页上的说明进行操作:
下载并解压 塔罗云台固件 v1.5 压缩包 文件到计算机上一个方便的位置
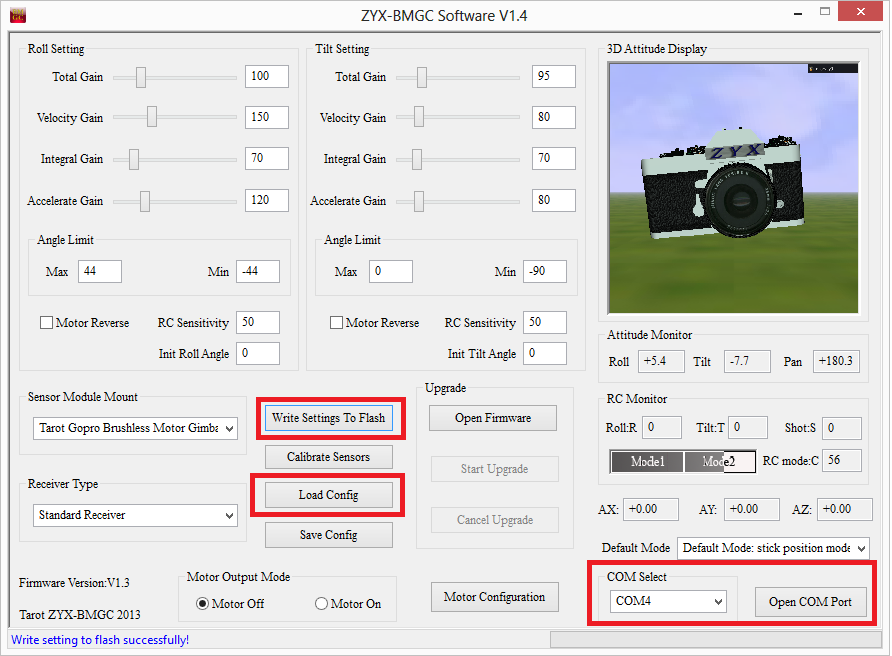
双击 ZYX-BMGC-EN_V1.5.exe 文件(可在上述压缩包中找到),然后会出现下图所示的配置用户界面
插入电池为云台供电
在配置用户界面中,选择 COM 端口并按下 打开 COM 端口 按钮。几秒钟后,随着万向节的移动,摄像机的图像应开始移动
最重要的设置是 默认模式 (就在 COM 端口下拉菜单的上方)到 默认模式:杆位模式.选择此项并按 将设置写入闪存
通过地面站进行设置¶
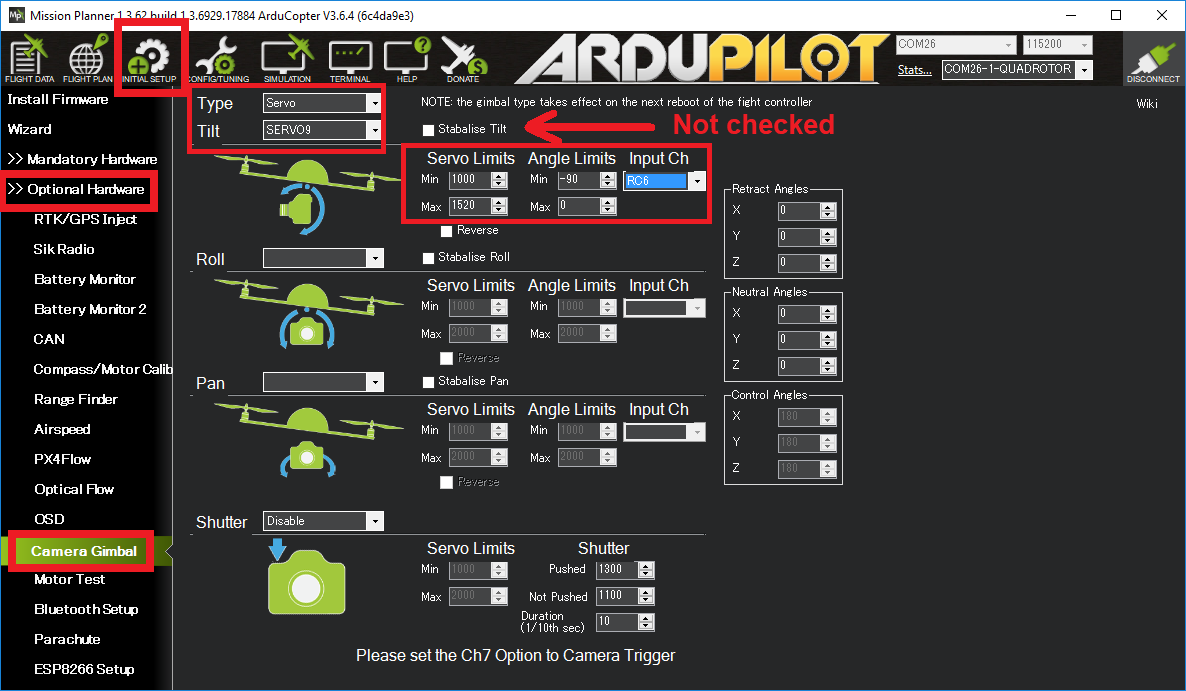
如果使用Mission Planner地面站,则可使用相机云台设置屏幕,如上图所示:
"类型 "应设置为 "伺服"。
"前平移/俯仰 "应设置为 "SERVO9",以指定 AUX OUT 1 连接到云台的俯仰输入端
"稳定螺距 "应取消选中
"伺服限制 "保存将发送至万向节的最小和最大 PWM 值。
"角度限制 "是万向节可以达到的地球框架角度(单位:度)。0 "度为正前方,"-90 "度为正下方
如果为首次安装手动设置参数:
MNT1_TYPE = 1(用于 "伺服 "万向节)
RC6_OPTION = 213 用于指定使用 RC 输入通道 6(通常是飞行稳定调整旋钮)来控制万向节的音高
MNT1_PITCH_MAX = 0 表示万向节的最高角度为零度(即向前)。
MNT1_PITCH_MIN = -90,指定万向节的最低角度为 90 度(即向下)
SERVO9_MIN = 1000,指定向万向节发送的最小 PWM 值
SERVO9_MAX = 1520,指定向万向节发送的最大 PWM 值
测试万向节移动是否正确¶
测试飞行员对俯仰的控制
通电后,当发射机的通道 6 飞行稳定调整旋钮处于最小 pwm 值(可能在 1000 左右)时,云台应指向其俯仰角最小值(即直向下);当飞行稳定调整旋钮处于最大值(可能在 2000 左右)时,相机应指向其最大俯仰角(即直向前)。Mission Planner地面站的无线电校准页面可用于检查通道 6 当前的输入 pwm 值。
测试投资回报率
您必须有 GPS 锁定才能测试投资回报率。 ROI 功能可将飞行器和/或摄像机指向目标。上述说明介绍了一种设置方法,即只控制 Tarot 万向节的俯仰角,因此当一个目标出现时,万向节就会自动调整其俯仰角。 设定投资回报率 收到命令后,Copter 会尝试转动飞行器的机头指向目标方向,并根据飞行器的距离和高度调整摄像机的俯仰角。您可以通过连接Mission Planner地面站来测试万向节俯仰动作是否正确,然后在 "飞行数据 "屏幕的地图上,用鼠标右键单击飞行器前方约 50 米处的一个点(橙色和红色线条表示飞行器的当前航向),选择 "将摄像机指向此处 "并输入-50(米)的高度。这应该会使云台以 45 度左右的角度朝下。

可通过设置一个 辅助功能开关 到 "缩回安装"(即 RCx_OPTION = 27),然后将开关移到较低位置。
更新云台软件¶
云台必须运行 1.4 或更高版本的固件。请按照以下说明更新控制器和电机固件。
使用 USB 加密狗将云台连接到电脑。确保将云台端插入 "云台控制器连接器"(见上文 "将云台连接到 Pixhawk "部分的图示)。暂时不要为云台供电。
启动 "ZYX-BMGC-EN_V1.5 "配置应用程序
选择 开放式固件 并选择 ./Firmware_V1.5/Gimbal Controller Firmware V1.5.bgsf 文件中的 Tarot 云台固件 v1.5 压缩包。
选择分配给云台的 COM 端口,然后选择 "打开 COM 端口"。
选择 开始升级.
连接电池为云台供电。您将在屏幕上看到绿色进度条,显示更新状态。
要验证固件更新是否成功,请断开并重新连接电池。选择 打开 COM 端口检查固件版本号是否显示更新版本。
现在您需要更新电机固件。断开万向节的电池连接,使其处于无电状态。将 USB 加密狗从 "云台控制器连接器 "上断开,然后重新连接到电路板另一侧的 "电机驱动器连接器 "上。
选择 电机配置.
选择 打开 COM 端口.确保选择与之前相同的 COM 端口(万向节控制器和电机控制器使用相同的 COM 端口)。
现在选择 开放式固件但这次要选择 ../Firmware_V1.5/Motor Driver Firmware V1.5.bmcf 定义
选择 开始升级.
连接电池为云台供电。另一个进度条将显示升级状态。
断开并重新连接万向节上的电池,以完成升级过程。
您可能需要再次检查/设置上述配置设置。尤其要检查手动控制模式是否为 "摇杆位置模式",完成后记得写入设置!