存档:飞行器快速入门指南¶
警告
存档文章
这篇文章已经过时(3DR 用 Pixhawk 取代了 APM2.x,套件中的所有配置均已开箱)。此外,3DR 不再提供本文所述的硬件(包括 Iris+、Solo、X8 和 Aero-M)。
本页为快速入门指南,适用于购买了 3DRobotics 即插即用 (RTF) 多旋翼飞行器 包括预装了最新 Copter 固件的 Pixhawk。所有其他用户应跳至 首次设置 部分,其中包括完整的(飞行)控制器设置和校准说明。
安装Mission Planner地面站¶
从此处下载最新的Mission Planner地面站 MSI.
打开 Microsoft 安装程序文件 (.msi) 并选择 运行 运行安装实用程序。
按照说明完成安装过程(接受许可条款、选择安装位置等)。
安装实用程序将自动安装任何必要的软件驱动程序。如果出现 DirectX 安装错误,请从 Windows 下载中心.如果收到如图所示的警告,请选择 无论如何都要安装该驱动程序软件 继续。
安装完成后,打开Mission Planner地面站。Mission Planner地面站会自动通知您可用的更新。请始终运行最新版本的Mission Planner地面站。
连接遥控接收器¶
您的遥控接收器是否已经连接并配置?如果没有,请按照以下说明操作。
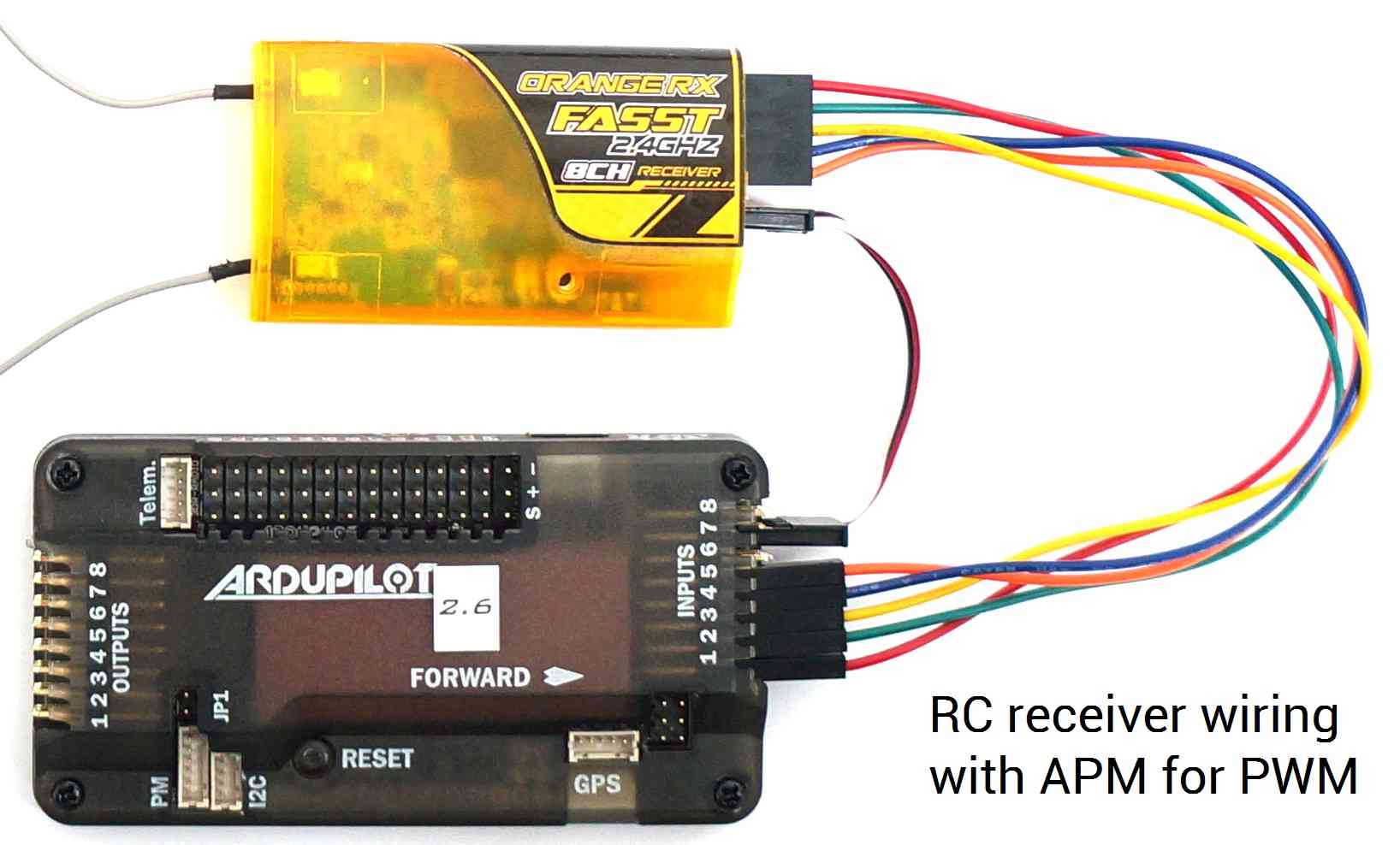
用于遥控 PWM将遥控接收机连接到 APM 输入信号引脚,使用连接器将通道 1 连接到 APM 信号引脚 1,通道 2 连接到信号引脚 2,等等。您还需要在接收器和 APM 之间为其中一个通道连接一条三线电缆,为接收器供电。
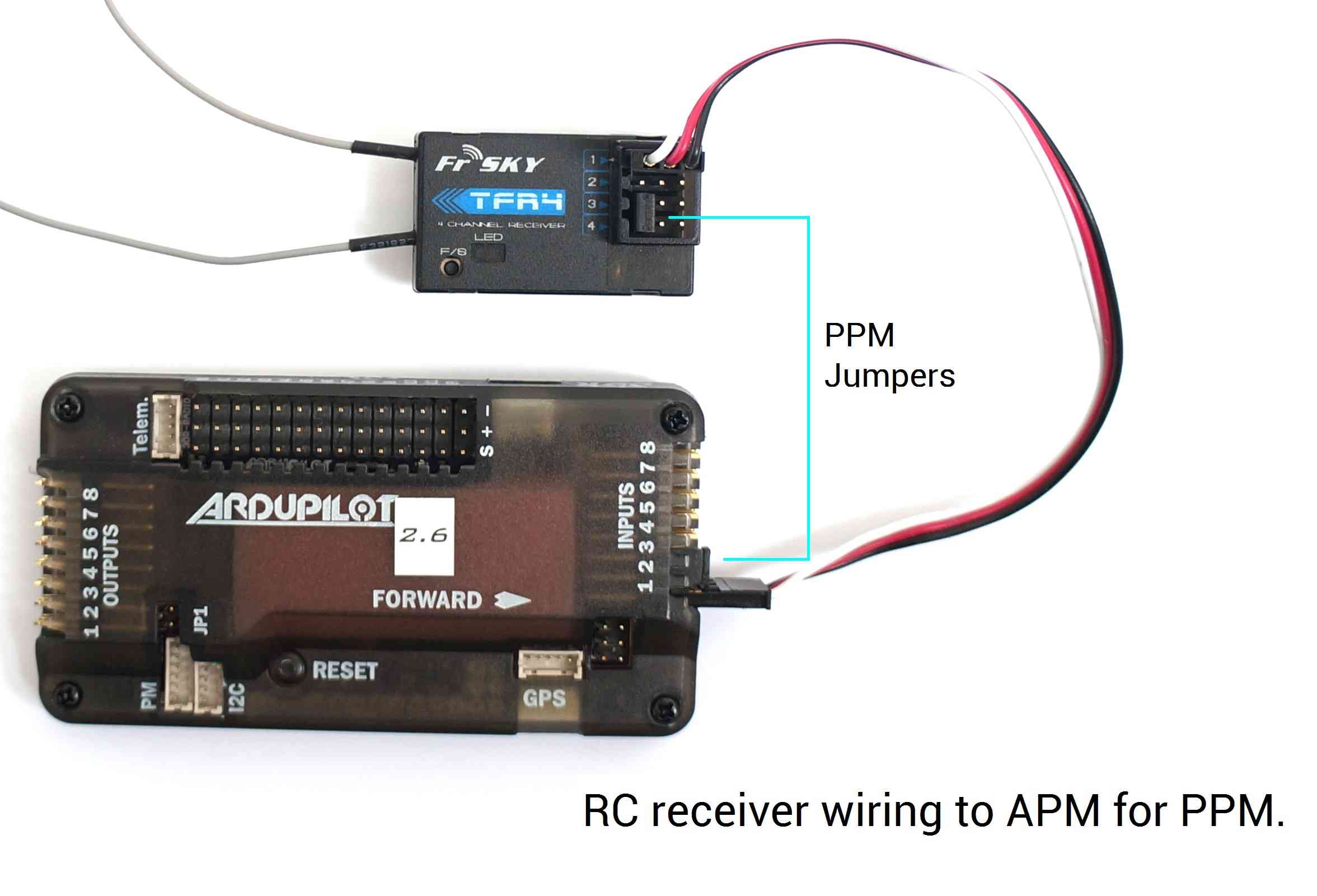
对于 PPM (使用 PPM 跳线连接器连接 APM 的输入信号针脚 2 和 3 以及接收机的信号针脚 3 和 4。使用三线电缆将接收机通道 1 的信号、电源和接地引脚连接到 APM 上标有 1 的三个引脚。接收器使用的具体针脚可能因型号而异,请查阅接收器上的文档了解 PPM 配置。
将Mission Planner地面站下载到地面站计算机后,使用微型 USB 连接器和 APM 的微型 USB 端口将 APM 连接到计算机。请使用计算机上的直接 USB 端口,不要使用 USB 集线器。

Windows 会自动检测 APM 并安装正确的驱动软件。
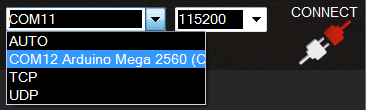
接下来,我们要让 Mission Planner 知道我们使用哪个端口连接 APM。打开Mission Planner地面站,使用屏幕右上角的下拉菜单(靠近连接按钮)连接 APM。选择 Arduino Mega 2560 并将波特率设置为 115200 如图所示。
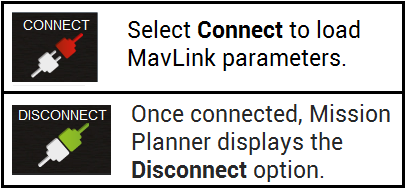
选择 连接 (屏幕右上角)将 MavLink 参数载入 APM。Mission Planner地面站将显示一个窗口,显示 MavLink 下载的进度。
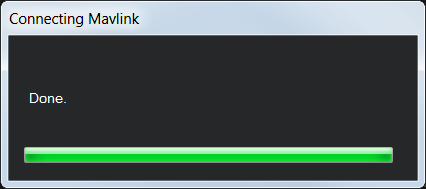
当窗口显示 已完成 和Mission Planner地面站显示 断开 选项代替连接,则 APM 固件已下载成功。
打开发射机。确认发射机处于飞行模式(无论驾驶何种平台类型,APM 都需要飞行模式),且所有微调都居中。
发射机(模式 2):推荐通道
左摇杆控制油门和偏航,右摇杆控制滚动和俯仰。三档开关可控制飞行模式。
在Mission Planner地面站中,选择 强制性硬件 和 无线电校准.点击绿色 校准无线电 按钮。Mission Planner地面站将调用一个对话窗口,确保无线电控制设备已打开、电池未连接、螺旋桨未连接。
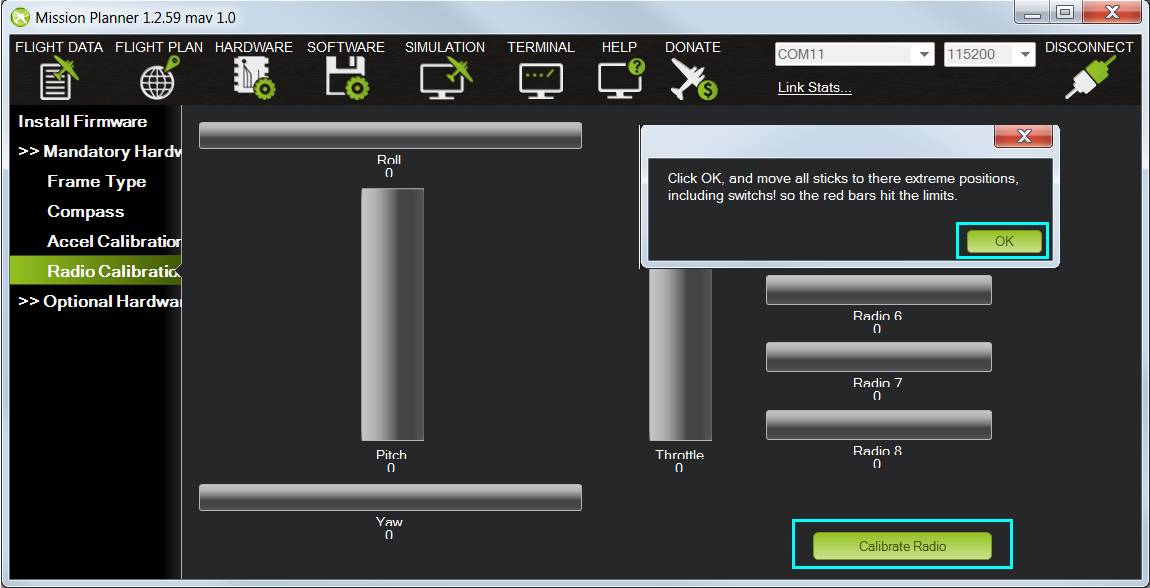
选择 "确定";将发射机上的控制杆和拨动开关移动到其行程极限,并观察无线电校准条上的结果。校准条上会出现红线,表示最大值和最小值。在其位置范围内移动 5 号和 6 号切换开关(7 号和 8 号切换开关不用于基本操作)。
您的发射机应引起以下控制变化:
通道 1:低 = 向左滚动,高 = 向右滚动。
通道 2:低 = 音调前移,高 = 音调后移。
通道 3:低 = 节流阀降低(关闭),高 = 节流阀升高。
通道 4:低 = 向左偏航,高 = 向右偏航。
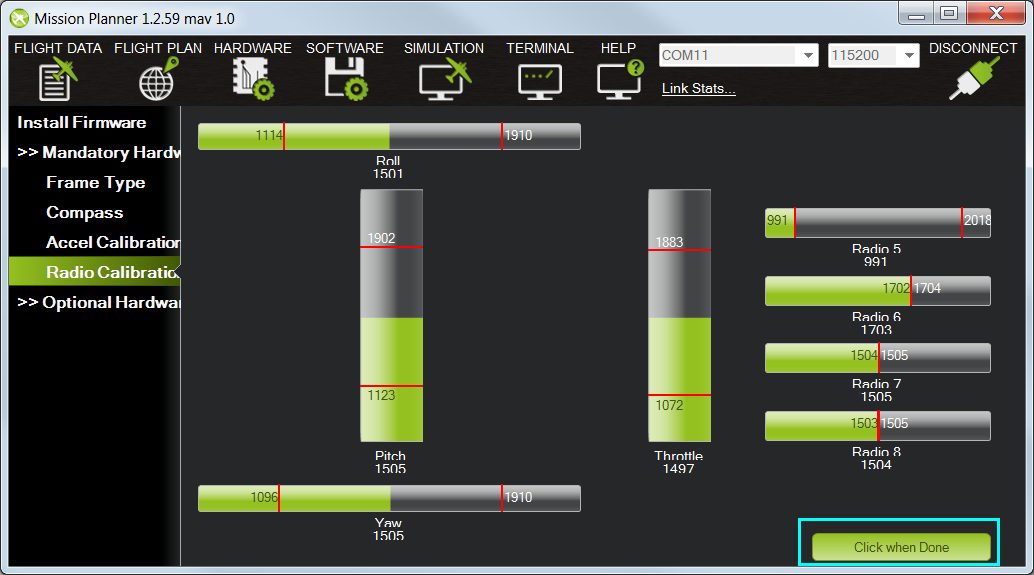
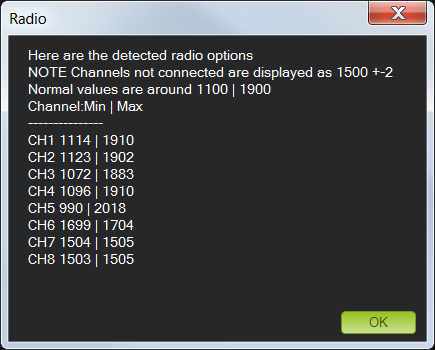
当滚动、前平移/俯仰、节流阀/电门、偏航和无线电 5(可选无线电 6)的红条设置在最小和最大位置时,选择 完成后点击.Mission Planner地面站将显示校准数据摘要。正常情况下,最小值约为 1100,最大值约为 1900。
安装螺旋桨¶
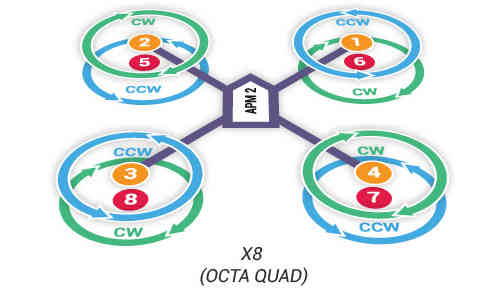
拧下螺旋桨螺母,将螺旋桨装入发动机夹头,螺旋桨上的文字相对于天空朝上。如果您使用的是同轴电机配置,即使电机朝下,也要确保螺旋桨上的文字朝上。如果螺旋桨轮毂高度不足 5 毫米,则在螺旋桨螺母顶部添加金属垫片。拧紧螺旋桨螺母,将螺旋桨固定到位。尝试将 2 毫米(5/64)六角扳手插入螺旋桨螺母侧面的孔中,以便在拧紧螺旋桨螺母时获得更好的杠杆作用。根据马达方向选择螺旋桨。在下面的图片中找到您的机架。标有顺时针方向的电机使用推进器螺旋桨,标有逆时针方向的电机使用普通螺旋桨。螺旋桨上通常标有 "P "或 "SFP"。
飞行前信息¶
安全是成功飞行的关键。请阅读 安全信息页面 飞行前。选择人烟稀少的地方驾驶旋翼飞行器,远离人群和发达地区,并始终运行 飞行前检查表在连接电池之前。请务必阅读 飞行 页,了解有关上膛、撤膛和飞行中控制旋翼飞行器的信息。
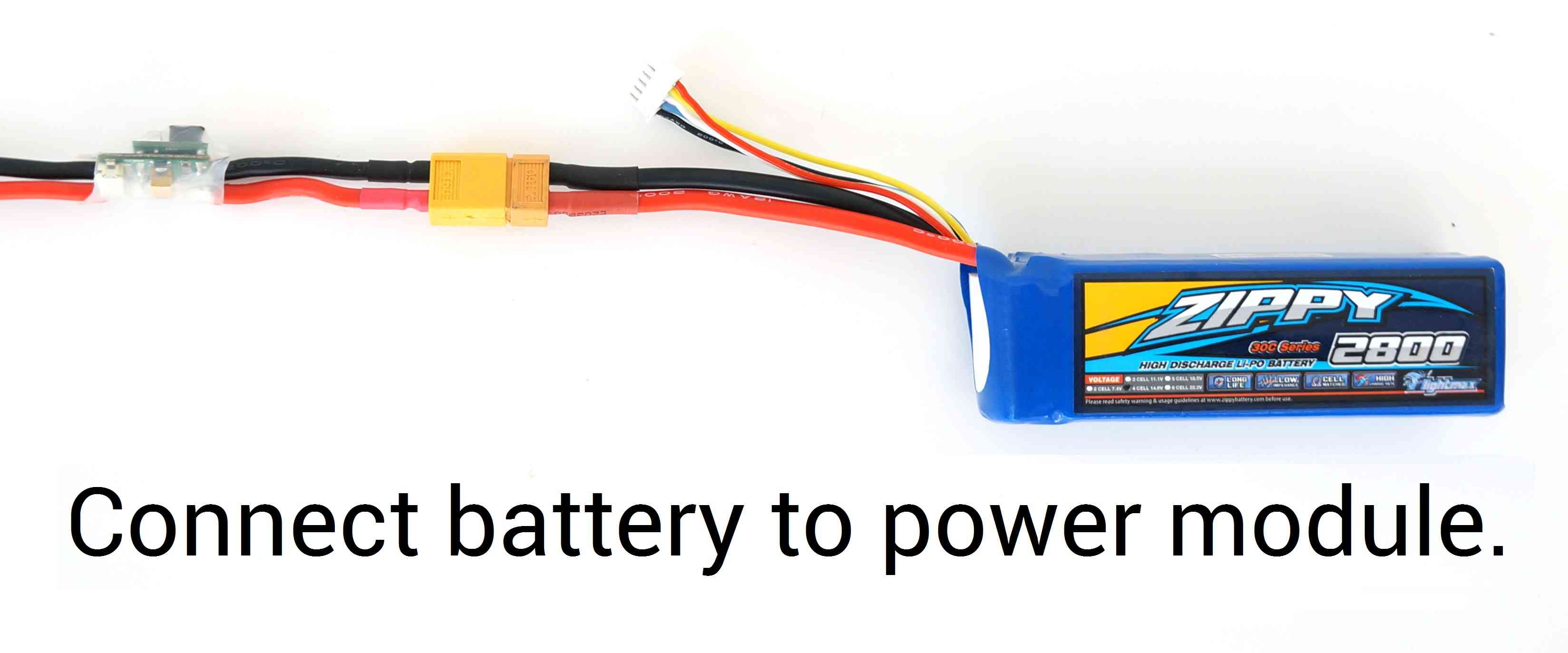
准备飞行时,将遥控飞行器放在地面上,朝向远方。准备开启旋翼飞行器电源时,将充满电的锂电池连接到电源模块连接器上。按照遥控器上的安全上膛和撤膛步骤进行操作。 处女航 page.
下一步工作¶
尝试了解不同的 自主飞行模式 以充分利用你的旋翼飞行器,包括位置悬停和执行任务。