存档
用于非 GPS 导航的 ZED 立体相机¶
本文介绍了如何 ZED 立体摄像机 可与 OpenKai 作为 GPS 的替代品,允许使用 Loiter、PosHold、RTL、Auto 等定位控制模式。
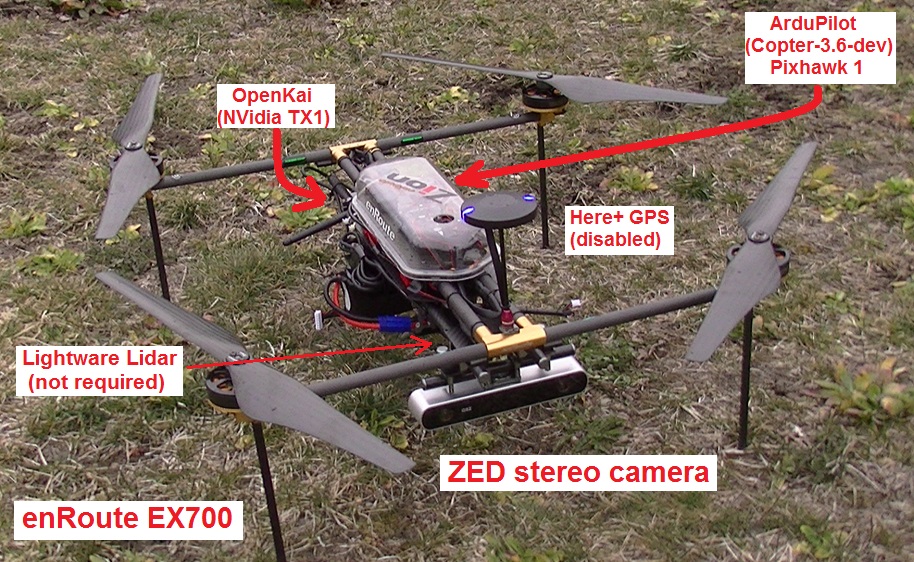
所需硬件¶
设置¶
如图所示,连接(飞行)控制器和 TX1。 作为伴侣电脑的 NVidia TX1 维基页面
按照 设置 TX1 部分,但要使用apsync-tx1-openkai 映像,请从 firmware.ardupilot.org
将 ZED 摄像机倒置安装并使用减震器固定在载具前部。在安装完 ZED 摄像机后,可将其正面朝上安装。 使用 ssh 连接 然后修改 ~/src/OpenKAI/kiss/apmCopter.kiss 所以 "bFlip "是 1.
为了从 stereolabs.com 下载 ZED 摄像机的校准参数,请在开机时用以太网电缆将 TX1 连接到互联网(此过程仅需一次)。
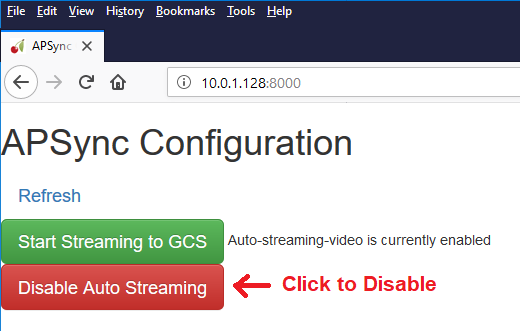
将您的计算机连接到 APSync 的接入点,禁用 APSync 的视频流(以便 OpenKai 可以使用摄像头)(
ssid=ardupilotpw=ardupilot),然后打开浏览器访问http://10.0.1.128:8000并点击红色 禁用自动流媒体 按钮(按钮应变为绿色),然后重新启动 TX1。
通过地面站进行配置¶
下面是第一个接近传感器的设置示例:
在 TX1 和(飞行)控制器之间使用 根据 tx1 设置维基页面上的 Pixhawk 说明进行设置
设置 AHRS_EKF_TYPE 至 3(表示使用 EKF3)
设置 EK2_ENABLE 为 0(禁用 EKF2)
设置 EK3_ENABLE 为 1(启用 EKF3)
设置 GPS1_TYPE 为 0(禁用 GPS)
设置 VISO_TYPE 为 1(启用视觉里程计)
可选择设置 PRX1_TYPE 为 2(启用使用 ZED 的深度图来避开物体)
您还可以选择
设置 VISO_POS_X, VISO_POS_Y 和 VISO_POS_Z 来计算摄像机与 IMU 或载具重心的偏移量 (更多详情)
将摄像机安装在其他方向并更改 视觉器官 参数。注意: 如果使用 ZED 的深度感应,还需要修改 OpenKai 的配置 (无记录)
地面测试¶
插入载具的锂聚合物电池,以便 TX1 和(飞行)控制器都能供电
使用 USB 电缆将(飞行)控制器连接到地面站
如果您使用Mission Planner地面站作为地面站,一旦信息成功从 ZED/TX1 传输到(飞行)控制器: - 应出现一个近距离查看器,显示与飞行器前方物体的距离(如果 PRX1_TYPE 如果启用了上述功能) - HUD 上的 "视线位置不良 "信息应消失
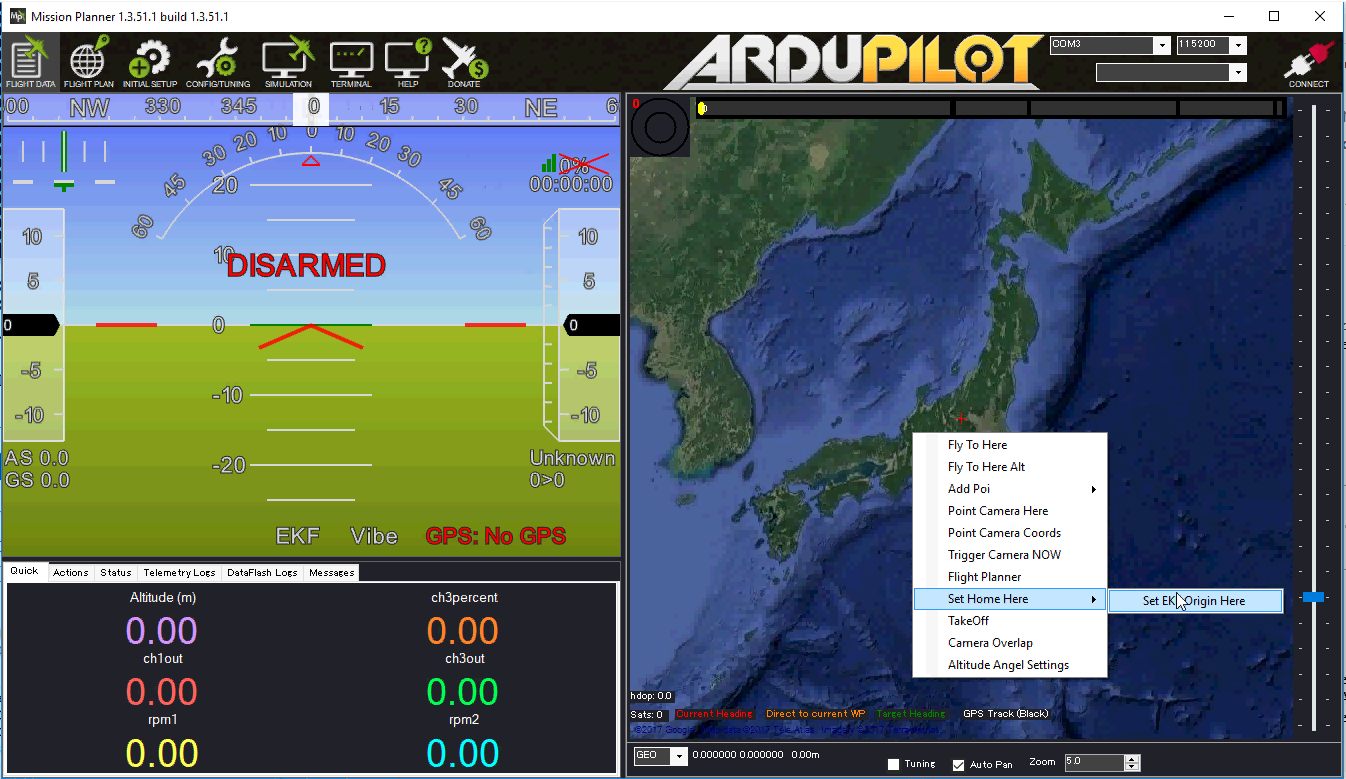
在地面站地图上设置原点(在 MP 的 "飞行数据 "屏幕上,用鼠标右键单击地图,选择 "在此设置 EKF 原点")。飞行器应出现在地图上。
取车并绕行一圈,检查地图上是否显示了载具的位置移动情况
飞行测试¶
数据闪存记录¶
ZED 的目视里程测量信息将显示在 VISO 数据闪存日志信息中。
载具前方物体的距离将显示在 PRX 信息中。
EKF 的目视里程测量信息将显示在 XKFD 信息中