归档:HIL 四通道模拟器¶
本文将介绍如何在Mission Planner地面站中设置 Quad HIL。
您需要什么¶
在 "Mission Planner地面站 > "配置选项卡 | 高级参数列表 "中保存当前参数,以便模拟后重新加载。
如何使其发挥作用¶
安全第一:取下四轴飞行器的螺旋桨,因为在模拟过程中电机是带电的!¶
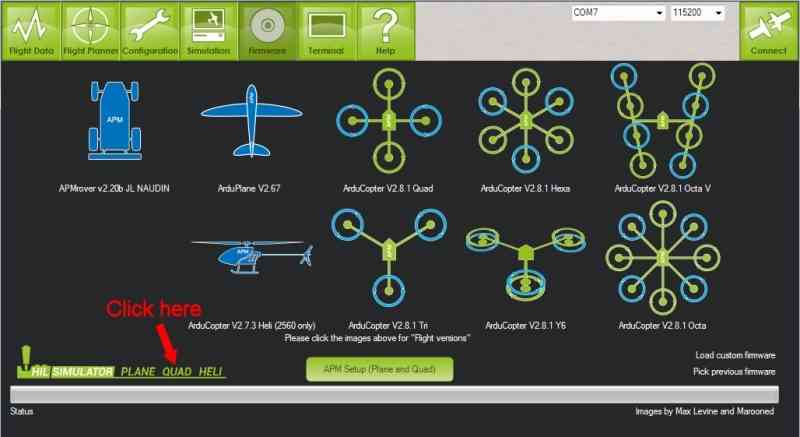
上传 quad hil 固件
2.将 quadhil.xml(随计划程序附带)复制到 FlightGear 目录,例如
C:程序 文件 (x86)FlightGeardataProtocol

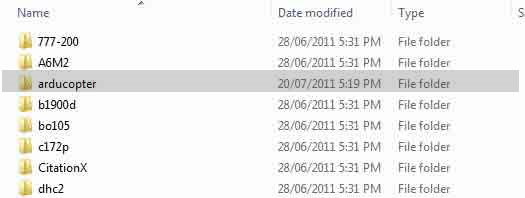
将整个 "arducopter "文件夹从
C:程序 文件 (x86)Mission 飞机规划师
到您的 FlightGear 飞机目录,例如
C:程序 文件 (x86)FlightGearAircraft
启动Mission Planner地面站
照常连接
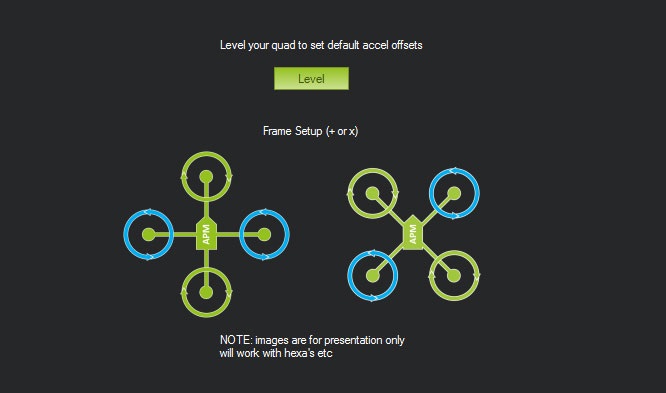
根据需要设置无线电/模式。将帧设置为 +。
转到模拟。
Check Quad 和 FlightGear。

点击启动 fg quad,等待 FlightGear 启动。
点击开始模拟链接。
对于想自己创建 FlightGear 的用户¶
这是用于启动 FlightGear 的 bat 文件
"C:Program Files (x86)FlightGear v20110705binWin32fgfs"; ^
"--fg-root=C:Program Files (x86)FlightGear v20110705data"; ^
"--geometry=400x300" ^
"--aircraft=arducopter"; ^
"--native-fdm=socket,out,50,127.0.0.1,49005,udp" ^
"--generic=socket,in,50,127.0.0.1,49000,udp,quadhil" ^
"--fdm=外部"; ^
"--prop:/logging/log/filename=fg_record.csv"; ^
"--log-level=info"; ^
"--roll=0"; ^
"--pitch=0"; ^
"--wind=0@0" ^
"--湍流=0.0"; ^
"--prop:/sim/frame-rate-throttle-hz=30"; ^
"-timeofday=noon"; ^
"--阴影--平面"; ^
"--fog-disable"; ^
"--disable-specular-highlight"; ^
"--disable-skyblend"; ^
"--disable-random-objects"; ^
"--disable-panel"; ^
"--disable-horizon-effect"; ^
"--disable-clouds"; ^
"--disable-anti-alias-hud";