归档:VR 云台控制器(三轴开源)¶
警告
存档
本文介绍如何设置和配置 VR Gimbal 3 轴无刷云台控制器,以便与 ArduPilot 配合使用。
概述¶
"这款" VRGimbal (双轴 和 三轴 可用)开始时,是开放源代码 马丁内斯双轴无刷云台控制器 该版本是为了支持功能更强大的 STM32 CPU 而开发的,但自此之后大部分内容都已重写,包括三轴支持和用于与(飞行)控制器或地面站进行串行通信的 MAVLink 等重要增强功能。
硬件原理图即将发布
备注
我们还没有推荐与 VRGimbal 配合使用的经济实惠的三轴云台。到目前为止,ArduPilot 开发团队的测试仅限于使用 Tarot 2 轴云台。
将 VRGimbal 连接到 Pixhawk¶
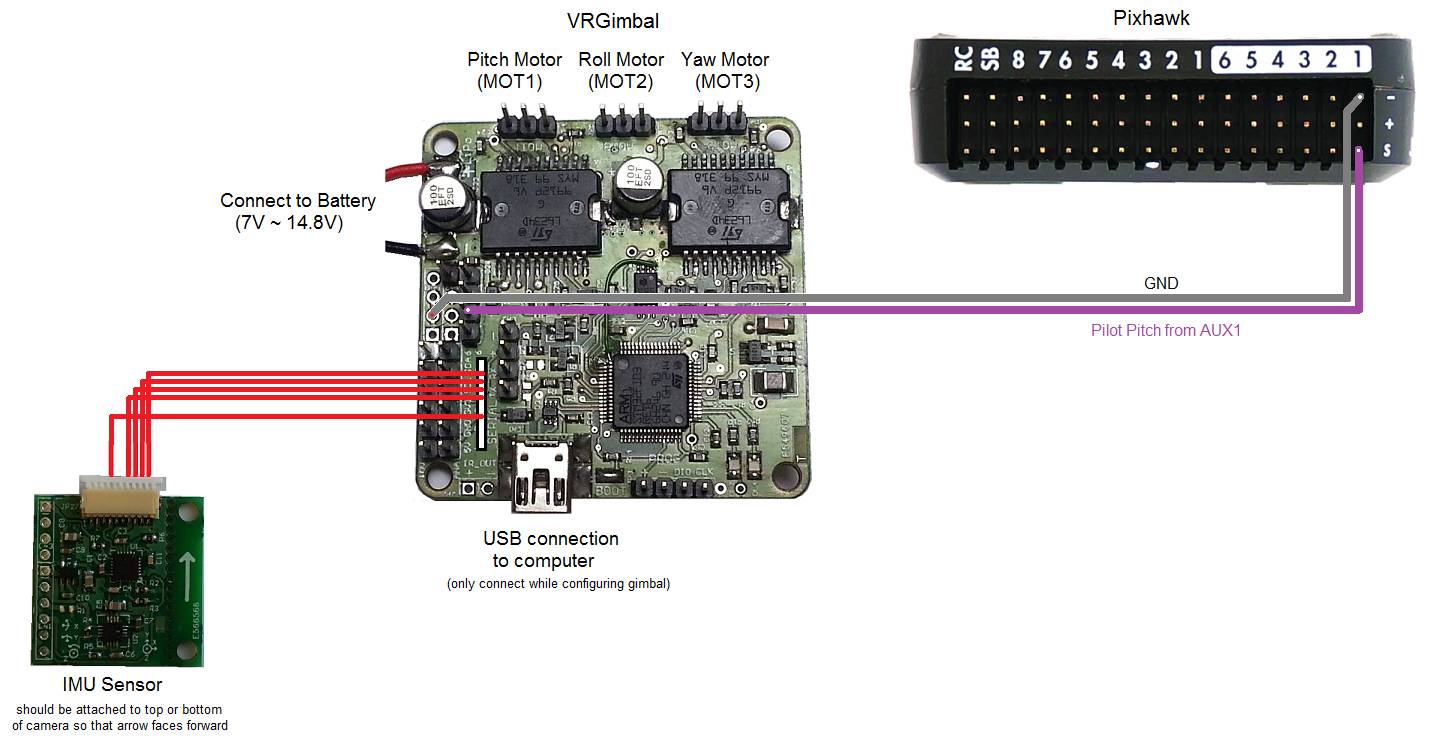
IMU 传感器应安装在摄像机的顶部或底部,使白色箭头指向前方。
云台控制器的红色和黑色电源线应直接连接到 3S 或 4S 电池上。
前平移/俯仰、翻滚和偏航(如果有)万向节电机应分别连接到 MOT1、MOT2 和 MOT3。
RC2 "引脚(电路板底部的标签)应连接到 Pixhawk 的 AUX OUT 1 信号引脚(见上图)。
电路板边缘靠近 "RC2 "的接地引脚应连接到 Pixhawk 的 AUX OUT 1"-"引脚(见上图)。
运行¶
云台通电后,绿色电源指示灯(上图右下角)应立即亮起。在启动后的 10 秒钟内不得触碰云台,因为云台将执行 IMU 校准。校准完成后,红色 LED 灯(紧挨着绿色 LED 灯的左侧)将会亮起,控制器将尝试稳定云台。
LED 的含义
绿色固体 LED = 电源接通
红色 LED 灯稳亮 = 校准完成,稳定摄像机
配置云台¶
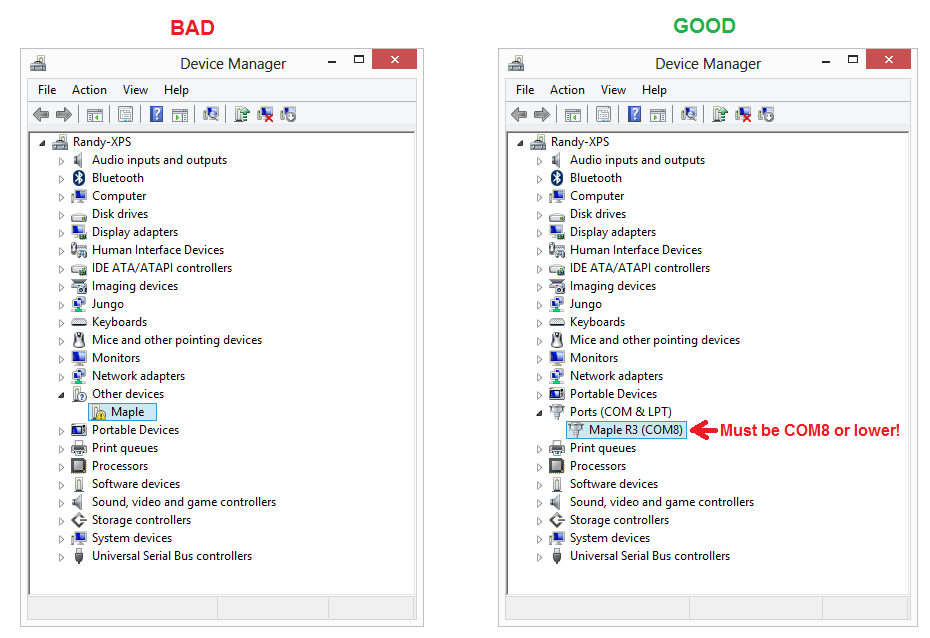
使用微型 USB 电缆将 Gimbal 板连接到计算机(仅限 Windows?)如果这是您第一次插入加密狗,您将看到一个 USB 设备安装窗口,但很可能会失败(见下面的 "BAD "设备驱动程序屏幕截图)。
更新 Maple 驱动程序
从以下网址下载最新驱动程序 这里 并解压缩到电脑上方便的地方
在设备管理器中,用鼠标右键单击枫树驱动程序,选择 "更新驱动程序软件",然后选择 "浏览我的电脑中的驱动程序软件",并选择解压驱动程序的文件夹。Windows 8 机器可能会因为驱动程序未签名而发出报警,说明如下 这里 如何解决这个问题。
安装驱动程序后,如果 Maple 设备显示为 COM9 或更高,则无法连接。可以使用控制面板的 "设备管理器 "将端口重新分配到 COM1 ~ COM8 范围。
下载并运行最新的 VRGimbal UI 安装 .msi 文件,请访问 VRGimbal wordpress 网站,并从 "下载 "菜单中选择顶部项目.在编写本维基页面时,它是 版本 1.13.安装完成后,"VRGimbal GUI "应出现在开始菜单中。
从开始菜单启动 VRGimbal GUI。
用微型 USB 电缆将云台连接到电脑上
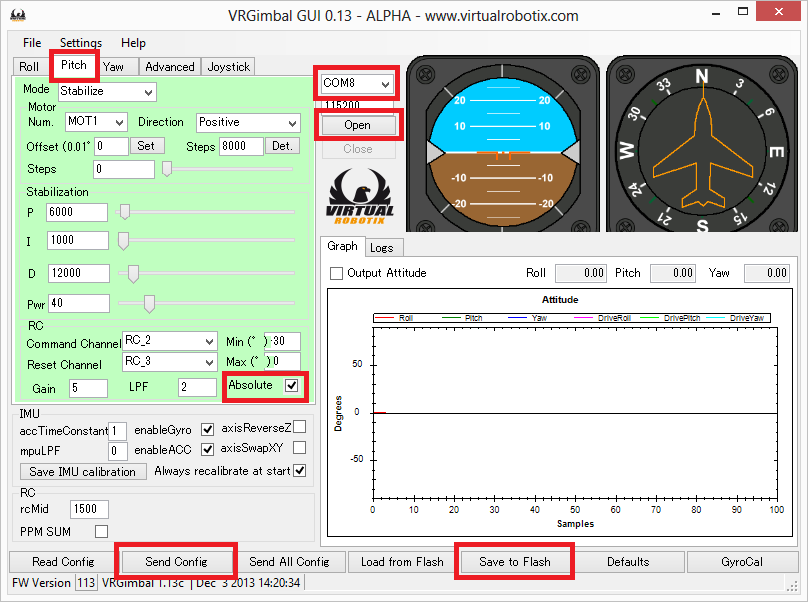
在 VRGimbalGUI 上选择 COM 端口并按下 开放 按钮
点击 间距 选项卡,点击 绝对 复选框,按 发送配置 和 保存到 Flash 按钮。
通过Mission Planner地面站进行设置¶
通道 6 飞行稳定调整旋钮的输出可用来控制万向节的俯仰角:
将 Pixhawk 连接到Mission Planner地面站
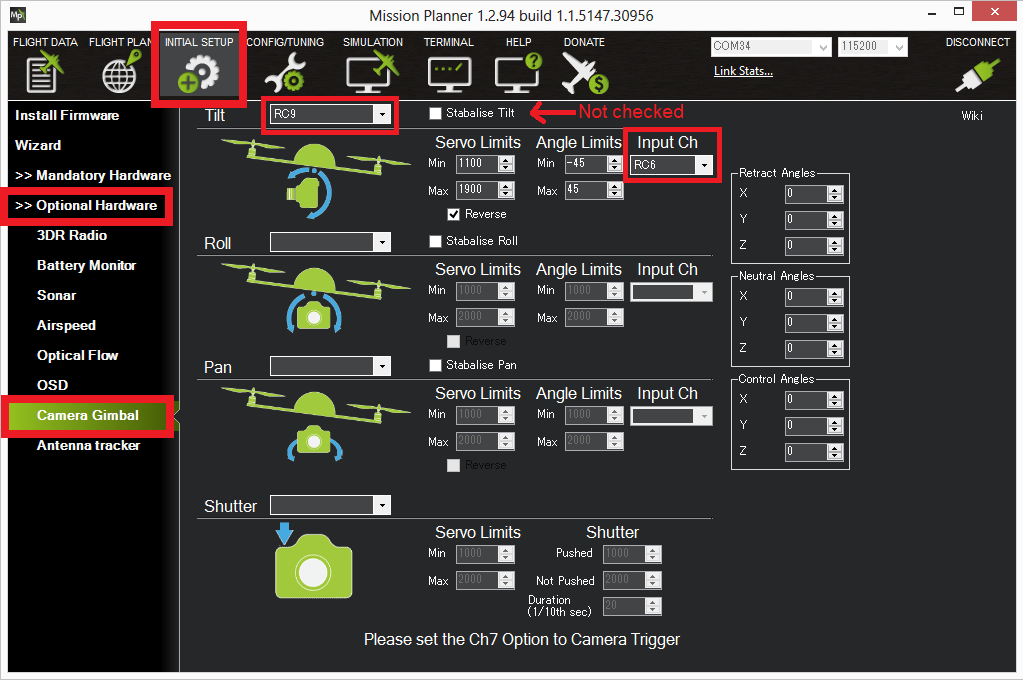
打开 初始设置 | 可选硬件 | 摄像机云台 屏幕设置:
倾斜下拉至 RC9(相当于 AUX OUT1)
输入通道下拉至 RC6
不应选中 "稳定倾斜 "复选框
更新云台软件¶
请参阅 VRGimbal 固件升级 wordpress 网站 了解详情。
常见问题¶
相机不平。按照本页底部的说明执行加速度计校准。 本页.
小型万向节电机会发出高音尖叫。连接 VRGimbalGui,进入 "高级 "选项卡,将 "PWM 频率 "设为 "高"。按下 发送配置 和 保存到 Flash 按钮。
其他开源替代方案¶
Martinez 2 轴云台控制器 使用原版 AVR328 芯片的零售商包括 业余爱好.
OlliW 的 STorM3 BGC 3 轴 STM32 无刷万向节控制器 是开源硬件、闭源(但免费)云台固件和开源 Windows 配置 UI。
关于 VRGimbal 的问题?发布到 VRGimbal 用户组 (与 DIYDrones 或 3dRobotics 没有直接关联)。