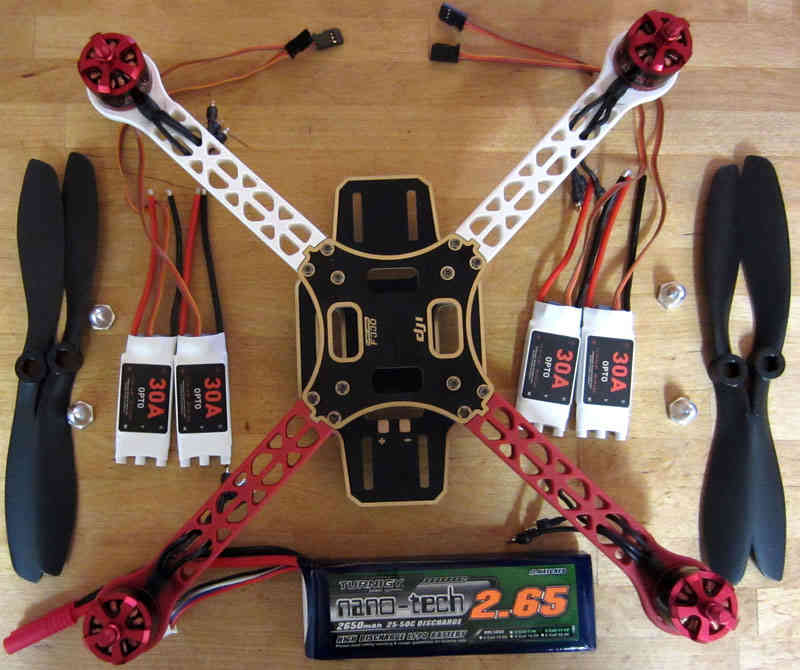
存档:大疆 F330 火焰轮四旋翼飞行器组件¶
本文概述了大疆创新 F330 FlameWheel 四旋翼飞行器,并提供了组装说明。
DJI F330 FlameWheel 价格便宜、坚固耐用、体积小。¶
它可以在室内或室外飞行。
尽管体积小巧,但 F330 的重量却很可观,可轻松携带可飞行 15 分钟的电池。
如果需要,F330 可以携带 GoPro 型摄像机或 FPV 系统。
ARF(几乎可随时飞行)套件非常便宜,包括电机、电调(电子速度控制器)和螺旋桨。
ARF 套件中提供的 DJI 电机和电调质量上乘,非常耐用,使用寿命长。
车架非常坚固,所有更换部件都很容易买到,而且价格低廉。
大疆创新的 F450 火焰轮是 F330 的理想替代品。¶
F450 FlameWheel ARF 套件拥有更大的框架、30 安培电调和 10 英寸螺旋桨,仅比 F330 多 10.00 美元。
F450 非常适合携带 GoPro 摄像机、无刷云台、起落架和更大的电池进行长时间飞行。
F330 和 F450 FlameWheel 是 PX4 和 PixHawk (飞行)控制器以及 APM 的绝佳平台。
事实上,我已经将我个人的 F330 改为使用 PX4 (飞行)控制器,并取得了巨大成功。
我强烈推荐 F330 和 F450 ARF 套件,它们性能可靠、坚固耐用、价格低廉,适合多种用途。
质量上乘,部件可提供长期无故障服务,而且更换部件既便宜又方便。
我真的不认为在 APM / PX4 / Pixhawk 兼容的多旋翼飞行器中能找到比这更划算的了。
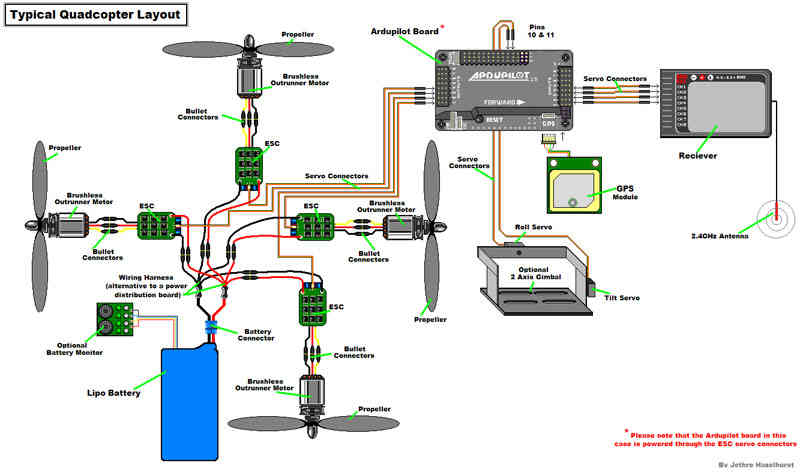
除火焰轮 ARF 套件外还需其他组件¶
带 UBlox GPS 模块和电源模块的(飞行)控制器(APM 2.6、PX4FMU + PX4IO 或 Pixhawk)。
遥控设备:遥控发射器和 5 个以上频道的无线电接收器(与 PX4 或 Pixhawk 的 PPM-SUM 兼容)。
一块 3 芯 1800mah 至 2650mah 锂聚合物电池和一个合适的电池充电器。
杂项:母对母 3 线接收机/舵机电缆、电池带、扎带和一些杂项硬件。
您还需要一个可调烙铁、松香芯焊料、蓝色螺纹锁固剂和一些小型公制内六角扳手。
机架和电机组件¶
获取 "手册": F330_User_Manual_v1.6_en.pdf.(如果有更新的版本,您可以在 大疆创新网站火焰轮支持部分).
与其说是手册,不如说是装配图,但图片绝对有用。
大疆的说明书显示,首先要将电调焊接到配电板(底框板)上。
在我们的例子中,它们是在框架组装后安装的,因为这样可以更紧密地贴合。
不过,在将电调引线焊接到底板/配电板时,确实需要一些创意。
你的选择
组装框架时,在内六角螺钉的螺纹上少用蓝色或紫色可拆卸螺纹锁固剂。
尽量不要让多余的螺纹锁固剂沾到塑料上。这实际上是不可能做到的,但要尽力而为。
电机和机架螺钉上都有一个凸肩,需要充分拧紧,使凸肩完全就位。
好的方法是松松地安装所有螺丝(用 Locktite),然后逐个拧紧每个框架臂上的所有螺丝。
一次完成。
安装电机时,在电机引线从电机底部出来的地方向上预弯,以便电机能够平放。
让引线朝旋翼飞行器中心方向伸出。
电机底部的螺钉是偏置的,只能从两个方向安装,朝中间安装是正确的。
电机螺钉较短,启动电机底部的第一颗螺钉比较麻烦。
确保电机引线没有将电机推起。
在每颗螺丝上涂上蓝色的锁固胶,松松地安装电机的所有 4 颗螺丝,然后拧紧。
将电机引线穿过前两个大框架部件孔。
或者,如果您愿意,也可以将它们绕着框架部件运行。
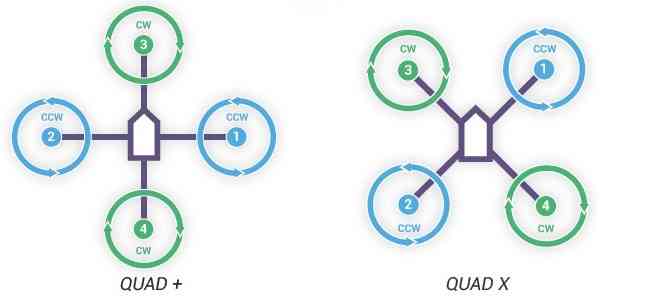
请注意使用以下适用于 QuadX 的 ArduPilot 编号约定将电机连接至 PixHawk。DJI FlameWheel F450 说明中的编号规则不同,错误的写法会导致姿态不稳定。
安装电调和焊接配电板¶
用捆扎带安装电调。
将绑带从前向后穿过车架部件,并穿入电机子弹头连接器插座之间。
将电调电源线穿过框架部件底部的插槽。
然后将它们微调并焊接到配电板上。
这样做比从车架外侧绕过去要难一些,但更整齐,电池间隙也更大一些。
上图显示的是配电 "Y "连接器,其功能与 FlameWheel 的内置配电板相同。
将电调和电池电源线焊接到配电板上时。
对焊盘和导线进行助焊剂预热,以获得适当的镀锡(湿)焊点。
电路板会吸收大量热量,因此要将烙铁设置得足够热。
DJI ARF FlameWheel 套件的光电调速器不包括 BEC,因此您需要外接电源。
现在,APM、PX4 和 Pixhawk 都配备了可以使用的电源,否则您就需要购买 BEC。
Castle Creations 生产的 10/5 安培 BEC 性能卓越,非常可靠,价格约为 20.00 美元。
无论如何都要使用开关式 BEC,它们比线性 BEC 更可靠、更高效。
如 Copter Wiki 的其他地方所示,您不需要平衡 DJI 电调,事实上也无法平衡。
DJI 电调是数字式的,采用光学隔离,出厂时已完全预平衡,开箱即可正常工作。

(飞行)控制器的减震安装¶
(飞行)控制器需要特别注意尽可能消除振动。
这种 F330 FlameWheel (飞行)控制器采用了特殊的防震悬挂装置。
在(飞行)控制器的每个角上都有一个折叠的 1/16 英寸 O 形环,环绕着从一个小支座中伸出的螺钉。
如果您选择使用这种方法,则要在每块木板的拐角处留出 1/10 英寸至 1/8 英寸的间隙,以保证适当的短耦合间距。
F330 需要用 Dremel 工具在每个框架臂上进行小手术,以在顶板上实现适当的孔距。
Kyosho Zeal Gel 是一种易于安装且完全令人满意的 O 形环悬挂法替代品。
只需在(飞行)控制器的每个角落下放一块 3/4 英寸见方的背胶 Kyosho Zeal Gel。
用尼龙搭扣带将(飞行)控制器固定在 1/2 英寸的软泡沫上,张力不要太大。(切勿过度拉紧!)。
无论是 Kyosho Zeal Gel 还是 O 形环悬挂法,都能将振动限制在大约 1/10 G 的范围内,这样就没问题了。
有关防震技术、方法和 "飞行稳定调整 "的更多详情,请参阅《防震技术》。 维基防震部分
电机对罗盘干扰的补偿是 在此涵盖!
(飞行)控制器的正确接线和飞行配置在 Wiki 的其他地方有详细介绍。

备注
*上面木板和框架上的魔术贴没有使用,实际上也没有接触*。
准备飞行¶
我们的构造方法允许电池插入两块框架板之间。
这是四轴飞行器重心的最佳位置。
这里使用的 2650mah 锂聚合物 Turnigy Nano 电池是最适合的大电池,但可以实现 15 分钟以上的飞行。
用液态电工胶带或硅胶覆盖底部框架配电焊点,为电池做好准备。
用气泡膜包裹电池并用胶带固定,以提供与焊点的额外电气隔离。
这还将为振动和次优 "着陆 "提供缓冲。
用尼龙搭扣电池带穿过框架底部的插槽固定电池。
F330 ARF 套件附带的 DJI 原装 8" 螺旋桨可以正常工作。
不过,F330 FlameWheel 绝对可以从 9 英寸螺旋桨中受益(10 英寸螺旋桨无法安装在 F330 上)。
GemFan 9" 多旋翼 "碳填充 "螺旋桨每个仅售 2 美元,比原装的 8" 螺旋桨更出色。
这些 GemFans 几乎不可能损坏,而且 9 英寸螺旋桨的效率大大高于 8 英寸螺旋桨。
9" GemFan 螺旋桨与 DJI 马达的椭圆形轮毂不匹配。
不过,您可以用普通钻头小心地将其钻孔至 0.31 英寸左右,这样就能完全吻合了。
在我的 F450 Flamewheel 上,我使用的是 11 英寸 GemFan 螺旋桨,镗孔方式相同。
一般来说,螺旋桨直径越大越好,只要不超过电动机或电调的最大值或导致过热。
确保螺旋桨朝上(印刷在上面),如果螺旋桨颠倒了,就飞不起来了。
10 秒钟后,电调和电机在不转动的情况下自动解除。
因此,只要您保持静止(在地面上)超过 10 秒钟,就需要重新上膛。
这是一项出色的安全功能。
您需要按照本 Wiki 其他地方的说明在个人电脑上安装Mission Planner地面站软件。
然后,您需要使用Mission Planner地面站将 QuadCopter 固件加载到(飞行)控制器中。
然后,您需要在Mission Planner地面站中为 FlameWheel 设置各种飞行参数。
(请勿尝试校准 DJI Opto ESC,在接到指示之前请勿安装螺旋桨)。
准备飞行时,将旋翼飞行器放在起飞位置,打开发射机并插入旋翼飞行器电池。
(如果您有 PX4 或 Pixhawk (飞行)控制器,则按下启动按钮 5 秒钟)。
电调应发出一连串短促的音符,然后安静下来。
然后,将油门杆向下并向右按住 5 秒钟,就可以进行上膛。
上膛后,您必须在 10 秒钟内将电机节流,否则需要重新上膛。
飞行结束后,按住油门并向左旋转 5 秒钟,解除警报,然后断开电池连接。
在稳定模式下飞行 FlameWheel F330 或 F450 的一套良好的初始 PID(从 Copter 3.0.1 版开始)为
速率(滚动和俯仰)P = 0.09,I = 0.045,稳定(滚动和俯仰)P = 4.0