存档:Hoverthings Flip Sport 四旋翼飞行器¶
警告
存档文章
该框架已停产/无法购买。部分说明涉及 PX4FMU/PX4IO,该产品已不再受支持。
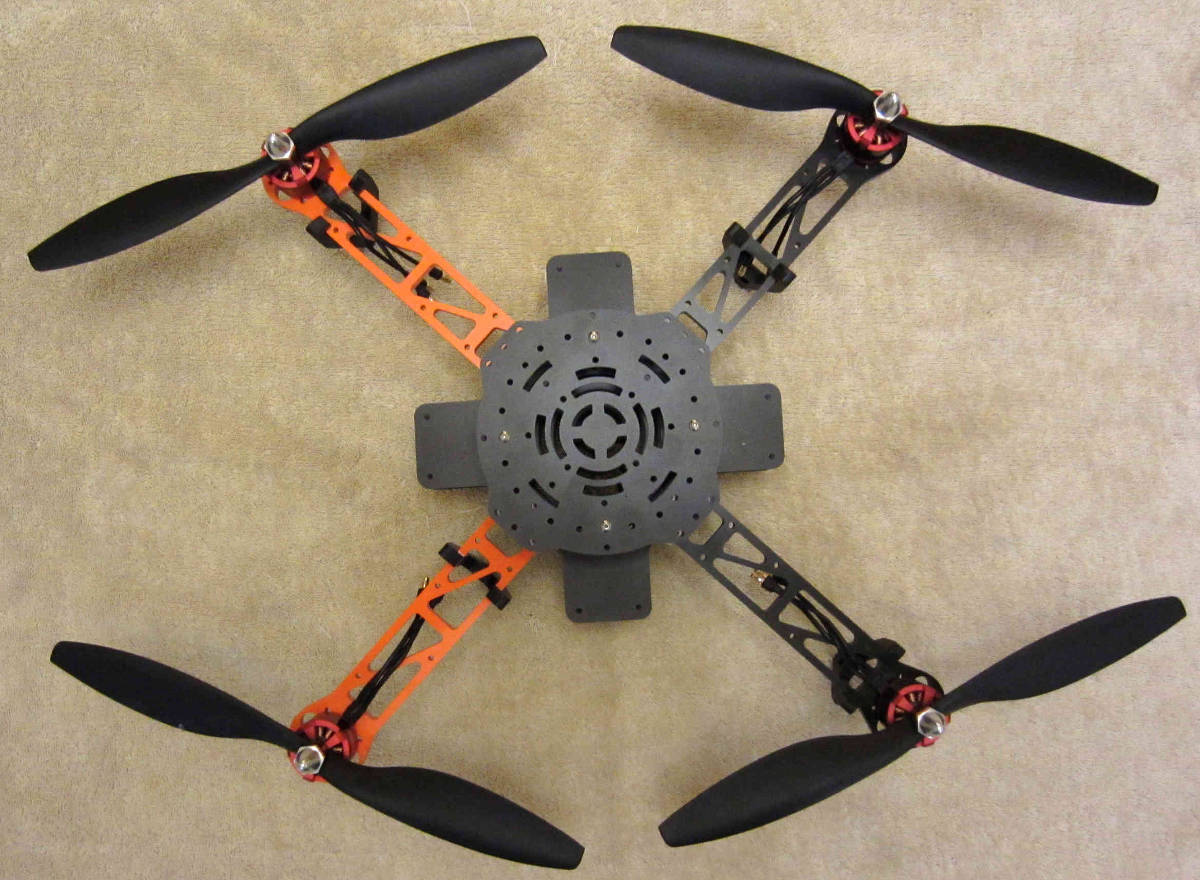
Hoverthings FLIP Sport 的制作非常简单,是一款非常坚固和高性能的小型四旋翼飞行器。FLIP Sport 非常适合 FPV 和 GoPro 摄影和摄像,甚至还可以安装无刷云台。

为什么选择 FLIP 运动?¶
最简单、价廉物美的自制项目是 F330 或 450 DJI FlameWheel 四旋翼飞行器。
F330 的构造在其他地方有详细介绍,而 F450 则基本相同。
我真的很喜欢这些小风火轮,它们给我带来了许多小时的乐趣,并抵挡住了我破坏它们的一切努力。
这一次,我想我要把它提升一个档次,让它更加坚不可摧,也许会更加有趣。
翻转框架套件从 Hoverthings 购买,售价 89.00 美元。
除了标准的运动车架套件外,我还购买了一对加长的中间车架片和一些额外的 7/8 英寸支座。
据说它几乎是坚不可摧的,如果没有核爆的直接影响,它们可能是对的。
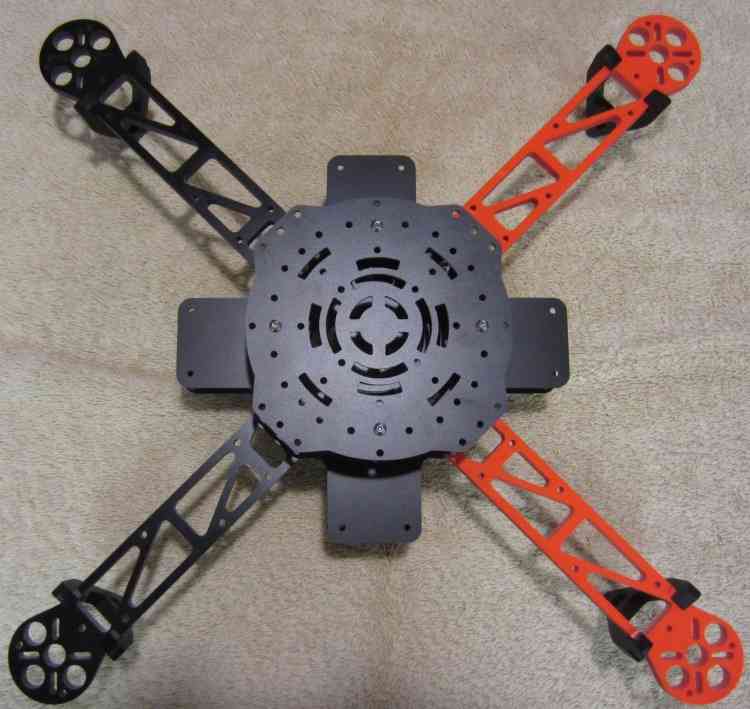
这些翻转臂上的框架臂被标榜为无比坚硬、无比结实。
支臂由 CNC 铣削而成,采用高密度 1/4 英寸厚玻璃纤维制成,非常坚硬,可以承受很大的冲击力。
框架中心也是非常结实坚硬的玻璃纤维,而且很有可能全部采用 G10 材质。
这是一款小型 380 机架,可容纳 10 英寸螺旋桨(介于 Flamewheel F330 和 F450 之间)。

该买什么¶
A Hoverthings 翻转运动框架 (约 89.00 美元)。
两个带标签的中心部分 和 八个 7/8 英寸支座 例如 与此类似).
四个用于 Flamewheel 的 DJI 电机,来自 Amain 爱好 每个 24.00 美元。
20 或 25 安培四合一电子调速器,来自 离网供水 40.00 美元。
A Pixhawk 兼容(飞行)控制器。
A GPS 和指南针模块 模块。
从 2600 到 4000mah 锂电池 可安装在两个底板之间。
与 PPM-Sum 兼容的接收器,可与遥控发射机配合使用: FRSky(德尔塔 8)建议使用 Futaba SBus 或 Spektrum 卫星。
用于 PX4 系统:A Kyousho Zeal 防震胶垫 和四个尼龙或铝制 1 1/2 英寸螺纹支座。
组装框架¶
根据您使用的是 Pixhawk 还是 PX4FMU/PX4IO,有两种不同的构造方法。
如上图所示,对于 Pixhawk,您需要在顶部使用第二个无标签的中心板,而对于 PX4FMU/PX4IO 则不需要。
施工步骤如下(在所有机器螺钉上使用蓝色防松剂)。
将 2 个带标签的中心部分与 4 个 7/8 英寸支座组装在 2 个孔上,这 2 个孔在 2 个对立面的末端相距 2 英寸。
使用支臂上方的短支座将支臂安装到其中一个带卡口的中心框架顶部,并使用锁紧螺钉。
确保安装两个带卡口框架部分的支座位于旋翼飞行器的两侧,而不是前后。
将较长的螺钉穿过带凸缘的板和支臂(2 个在外侧,1 个在中间偏向中间的位置)拧入短支座。
将四合一电子调速器插入机臂之间,并将多余的电机线缠绕在电子调速器上
在每个臂下留出约 3 英寸的 3 根电调电机电线(我还在每个电机上编织了电线)。
让电调信号线和电源线从后面伸出(在我的两个黑臂之间)。
在框架顶部放上一块未绷紧的框架板,用 12 颗螺丝固定在支座顶部。
用随机提供的螺钉将 DJI 电机安装到机架臂上(使用锁固胶),电机导线朝向旋翼飞行器。
将电机导线穿过框架顶臂开口,并连接到电调导线上(将多余的导线塞入框架内)。
安装 Pixhawk (飞行)控制器¶
如果使用的是 Pixhawk,则将剩下的 4 个 7/8 英寸长的支座直接安装在固定底部框架板的支座上。
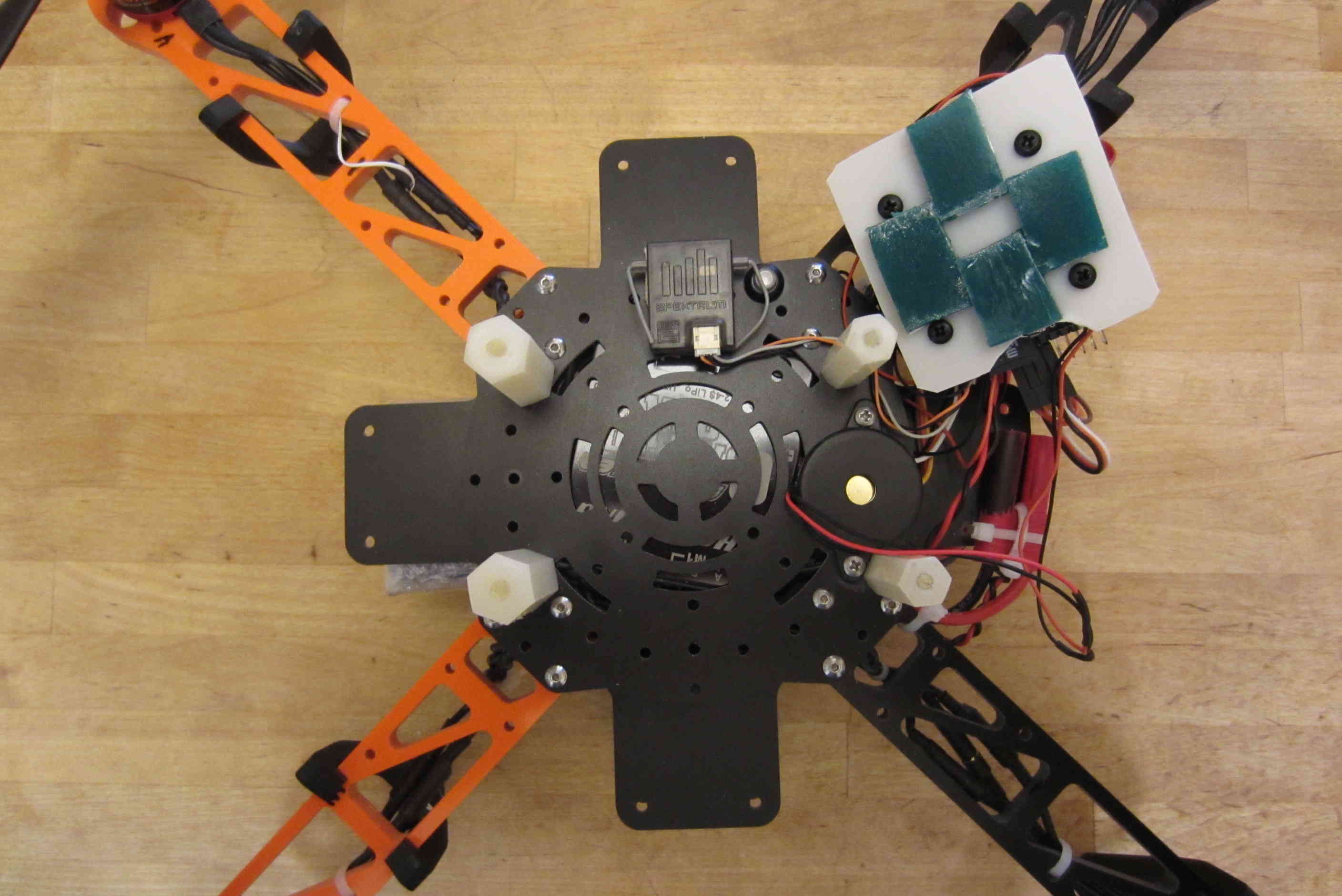
在 Pixhawk 底部的每个角上贴上 1 英寸见方的双面泡沫胶带。
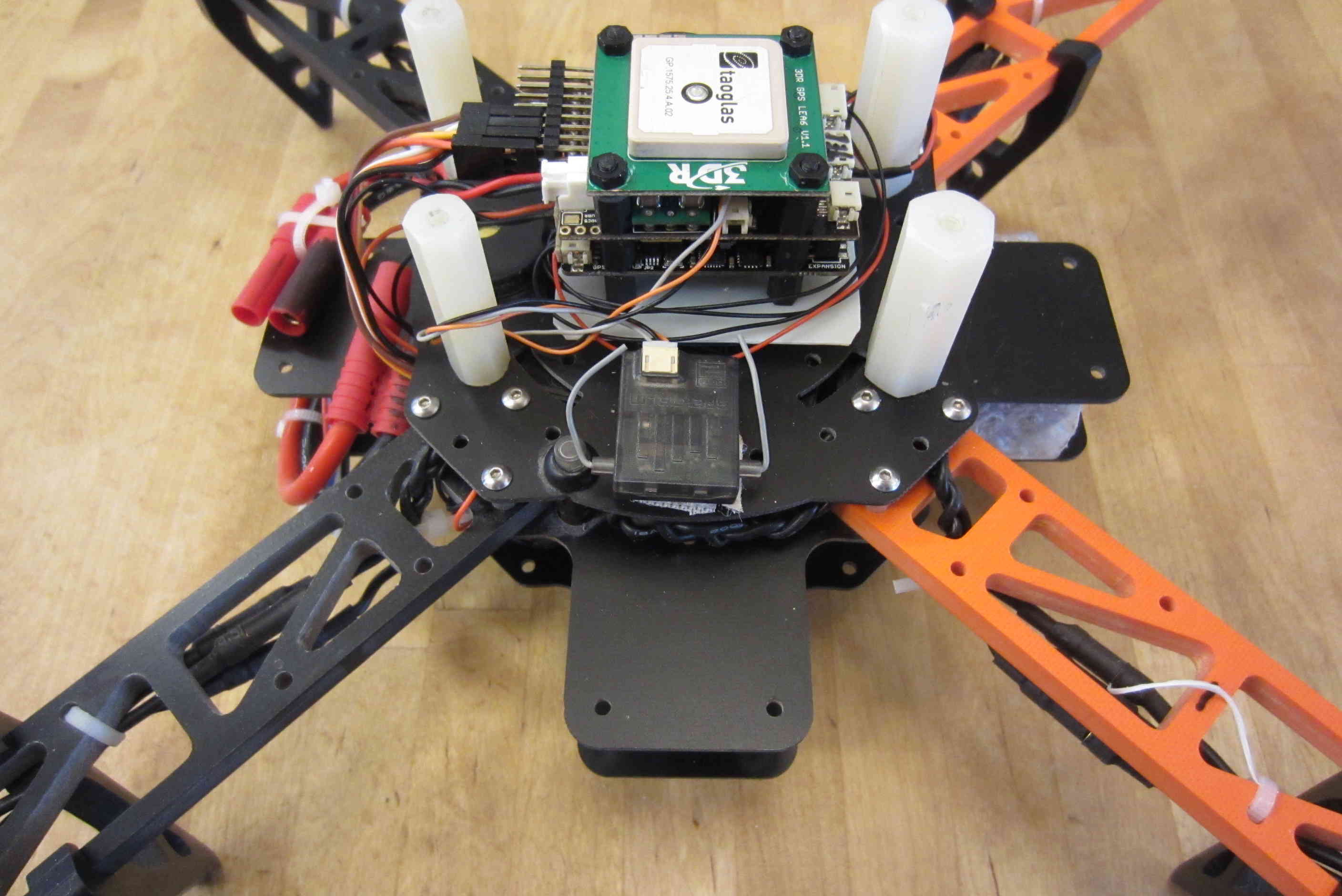
将 Pixhawk 粘贴到框架顶部,箭头指向前方(我的 Pixhawk 位于两个橙色臂之间)。
在顶部 2 块框架板靠近一侧边缘的框架臂上钻一个孔,以便安装 "安全 "按钮。
此外,还应将蜂鸣器安装在框架顶端构件的一侧,以免干扰接收器的安装。
将 3DR 电源模块连接到 Pixhawk 连接器上,并将电源模块安装在不碍事的地方。
将电源模块导线的另一端与电调电池导线一起焊接到电池连接器上。
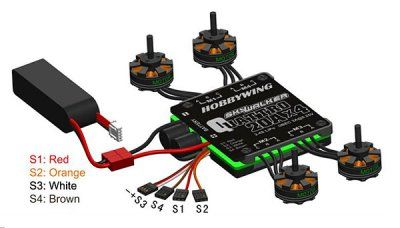
将电调的信号线装入 Pixhawk(主输出)伺服连接器(信号线在顶部)。
红线接 1 号线,橙线接 2 号线,白线接 3 号线(下面是红线和黑线),棕线接 4 号线。
将 GPS 和指南针导线安装到 GPS/Compass 模块和 Pixhawk 中。
用双面胶或尼龙搭扣将接收器安装在 Pixhawk 一侧(不接触)的顶部框架部件上。
从接收机的 PPM-Sum 输出到 Pixhawk 的左侧(RC)输入之间连接一条伺服导线。
如果是 Spektrum Satellite,则将 Spektrum 接收机引线连接到 Pixhawk 顶部的 Spektrum 接口。
将 Pixhawk 上部无标签的框架部件安装到上面已安装的 7/8 英寸支座上。
使用双面胶将 GPS 模块安装到顶部框架板的中心位置。
安装 PX4FMU/PX4IO (飞行)控制器¶
如果您使用的是 PX4,我们不能使用顶部框架板,但可以根据需要制作一个小硬顶。
用废塑料或玻璃纤维切割一个 2 英寸 x 2 英寸的长方形,用于支撑 PX4FMU/PX4IO。
在矩形板上钻 4 个孔,与 PX4 板上的安装孔对齐(大致居中)。
使用随附的 4 个黑色螺钉,将 4 个支座安装到矩形上。
将 PX4FMU 板(连接器朝上)插入 4 个支座螺柱,然后(小心地)将 4 个支座拧紧。
小心地将 4 个螺母拧紧在外露的螺柱上,将 PX4FMU/PX4IO 模块固定在您制作的矩形上。
将 PX4IO 板放在 PX4FMU 板上,使连接器对齐,然后向下按压螺柱。
在固定螺钉之间的 "矩形 "边缘各放一块 3/4 英寸见方的 Kyosho zeal。
将矩形粘贴在机架顶部的中心位置,伺服连接器朝向后方(黑色机架臂之间)。
在顶部 2 块框架板靠近一侧边缘的框架臂上钻一个孔,以便安装 "安全 "按钮。
还应将蜂鸣器安装在 PX4FMU/PX4IO 堆叠后面的顶部框架构件上,使其不接触 "矩形"。
将电源连接器插入 PX4IO 板,并将电源引线和电调电源引线焊接到电池连接器上。
将蜂鸣器和 "安全 "按钮引线连接至 PX4FMU/PX4IO 电路板。
将电调的信号线安装到 PX4IO 板的伺服连接器上(信号线在顶部)。
红线 = 右针,橙线 = 右数第二根,白线 = 右数第三根(下面是红线和黑线),棕线 = 右数第四根。
用双面胶或尼龙搭扣将接收器安装在 "矩形 "的一侧(不接触)顶框部件上。
确保接收器没有挡住 PX4FMU 板一侧的 USB 接口(放在另一侧)。
将一条伺服导线从接收机的 PPM-Sum 输出端连接到 PX4IO 伺服连接器的最左侧。
如果是 Spektrum 卫星接收机,则将 Spektrum 接收机引线连接到 Pixhawk 顶部的 Spektrum 接口。
要将剩余的框架板用作顶盖,可利用边缘附近的现有孔将 4 个支座拧到框架顶部。
将板拧到 4 个支座上。
您可以用长方形的塑料或玻璃纤维自制顶盖(我用的是有机玻璃,透明的也有用)。
确保矩形的大小和形状合适,以便将支座固定在顶板上。
在矩形的适当位置钻孔,必要时在顶部框架部件上也钻孔。
将支座安装到顶部框架构件和您制作的矩形顶上。
将 GPS/指南针模块粘贴到顶盖顶部的中心位置(朝向哪个方向并不重要)。
使用随附的接线电缆将 GPS / 罗盘模块连接到 PX4IO。
请注意,我的设置使用的是老式的 UBlox 独立 GPS,直接安装在 PX4 堆栈中。
最后组装¶
将电池安装在机架下部之间,并用尼龙搭扣带穿过机架底板的插槽将其固定。
如图所示,用拉链扎紧并固定电线和电缆,以防螺旋桨或其他东西卡住。
确保电池电缆牢固,但在需要时可以插上。

设置和添加¶
现在,您可以按照本维基百科中有关 Pixhawk 的其他内容对 Flip 进行配置。
两侧卡口之间有空间可放置 3DR 遥测无线电和/或 OSD 和 FPV 发射器。
FPV 摄像机可轻松安装在电池前方的 2 个前卡口之间。
如果使用 FPV,发射器和天线要远离 GPS。
Flip 有足够的动力支持带无刷云台和必要加长起落架的 GoPro 相机。
我经历过几次坠机,只在试图用它们砍倒一棵 80 英尺高的公牛松树时弄坏了两个螺旋桨(未成功)。
这架小型直升飞机性能卓越,具有很强的杂技表演能力,效率出奇地高,几乎坚不可摧,飞行起来非常刺激。