存档:模拟声纳(AC3.1)¶
备注
本文件被以下文件取代 Maxbotix 模拟声纳
旋翼飞行器支持 MaxSonar 系列声纳传感器,可在 Loiter 或 Alt Hold 模式下进行 "地形跟踪"。在这些模式下,旋翼飞行器将尝试与地面保持恒定距离。声纳还可用于 土地 模式。当声纳探测到飞行器下方有物体时,旋翼飞行器会将下降速度减慢至 50 厘米/秒(可通过 LAND_SPEED 参数进行配置)。

警告
RNGFND_MAX_CM 必须设置为经过测试的适当值。如果 RNGFND_MAX_CM 设置的值大于传感器的量程,(飞行)控制器将无法对所提供的数据做出正确响应。
支持的声纳¶
Maxbotix 推荐用于多旋翼飞行器的声纳是 MaxBotix XL-EZ4 (又名 MB1240),其最大范围为 7.65 米,窄波束有助于减少同频率其他声源的干扰。
绝对值得一读 将超声波传感器与 Pixhawk 或 ArduPilot Mega 交互 文章作者为 Maxbotix。
还支持其他声纳:
XL-EZL0 (最大测距 10.68 米,但分辨率较低,也是 XLL)。
HRLV-EZ4 (最大测距 5 米,但分辨率更高,也是 HRLV-EZ0)。
LV-EZ4 (最大射程 6.45 米,价格便宜,但抗噪声能力较差,也是 LV_EZ0)
我们尚不支持基于 I2C 的 MaxBotix 声纳。
建造一条减少声纳噪音的电缆¶
如以下文件所述 这篇 Maxbotix 文章因此,您需要制作一条特殊的电缆:
三线屏蔽电缆
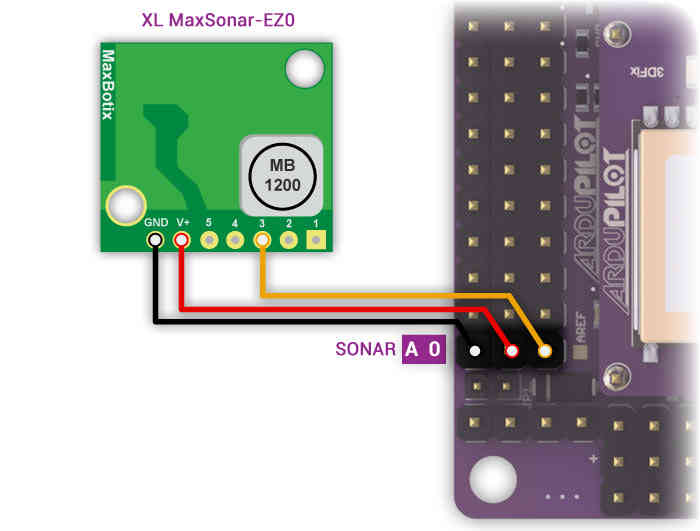
在 APM 2.x 上连接声纳传感器¶
如下图所示,传感器的 GND、V+ 和 "AN "或 "3 "引脚应连接至 APM 2 的 A0 引脚:
在 PX4FMU 上连接声纳传感器¶
您需要在Mission Planner地面站 - 配置 - 高级参数 - 高级参数列表中使用 SONAR_PIN 参数将声纳(信号线)分配到适当的 PX4 引脚。以下 PX4 "引脚 "可用于 SONAR。
SONAR_PIN = 11 -(推荐值)
空速 "引脚。位于 PX4IO 电路板上的 3 针 DF13 连接器上,但 PX4FMU 上的 ADC 可以直接看到。该引脚可承受高达 6.6V 的电压(内部有一个分压器)。
SONAR_PIN = 12
通用模拟输入引脚。该引脚位于 PX4IO 板上 "FMUSPI "端口的第 3 引脚,可直接读取 PX4FMU 模拟输入代码。电压最高可达 3.3V。
SONAR_PIN = 13
通用模拟输入引脚。该引脚位于 PX4IO 板上 "FMUSPI "端口的第 4 引脚,可直接读取 PX4FMU 模拟输入代码。电压最高可达 3.3V。我们正在对其进行研究,一旦完成,将在本节中介绍。
安装声纳传感器¶
声纳传感器必须安装在离电子噪声源(包括电调和其他干扰)至少三英寸(10 厘米)远的地方。
通过Mission Planner地面站启用声纳¶
将 APM/PX4 连接到Mission Planner地面站,然后启用声纳:
转到初始设置> 可选硬件> 声纳
选中 "启用 "复选框
从下拉列表中选择声纳型号

测试声纳¶
您可以将 APM/PX4 连接到Mission Planner地面站,然后测试声纳是否基本正常工作:
转到终端窗口,按 "连接至 APM "或 "连接至 PX4
出现提示时,键入 测试
类型 声呐
应显示声纳当前感应到的距离。将声纳对准不同距离的目标(如天花板、墙壁等),确保数字发生变化。如果没有变化,则可能是声纳或电缆的硬件问题。
如果没有听到这种声音,则可能是声纳有缺陷或由于某种原因没有通电。
调整增益¶
如果在飞行时发现飞行器上下摇晃,则可能是飞行器的默认 SONAR_GAIN 值过高。请进入Mission Planner地面站的配置/调整 > 完整参数列表,将 SONAR_GAIN 参数从默认的 0.2 降到 0.1 甚至 0.05,然后按 "写入参数"。
声纳最大高度¶
启用后,在声纳最大高度以下使用声纳确定高度,在声纳最大高度以上使用气压计确定高度。
声纳最大高度的计算公式为所选声纳类型的出厂指定最大声纳范围的 60%。
声纳仅在声纳本身探测到地面且低于声纳最大高度时才用于确定高度。
XL-EZ4 或 XL-EZ0 的最大射程为 7.65 米,声纳最大高度为 4.59 米。
XL-EZLO 的最大射程为 10.68 米,声纳最大高度为 6.4 米。
HRLV-EZ4 或 HRLV-EZ0,最大射程 5 米,声纳最大高度 3 米。
LV-EZ4 或 LV-EZ0 的最大射程为 6.45 米,声纳最大高度为 3.87 米。
如果声纳在声纳最大高度以下收到不可靠的回波,则忽略该回波,使用气压计高度。
寒冷天气性能¶
"这款" MaxBotix XL-EZ0 声纳(及其室内声纳的其他变体)在温度急剧下降(即从温暖的 27C/80F 室内降到寒冷的 10C/50F 室外)约 10 分钟后可能无法工作,因为传感器上会积聚冷凝水。
本职位 包括一名成员的盖尔-恩格巴肯在由 5V 电源供电的声纳基座上连接 4x10 欧姆电阻的解决方案(最初由开发人员 Olivier ADLER 提出)。
声纳噪音的其他潜在原因¶
如果您遇到声纳噪音过大的问题,如下面的数据闪存日志所示(声纳为红色,气压计为绿色)。
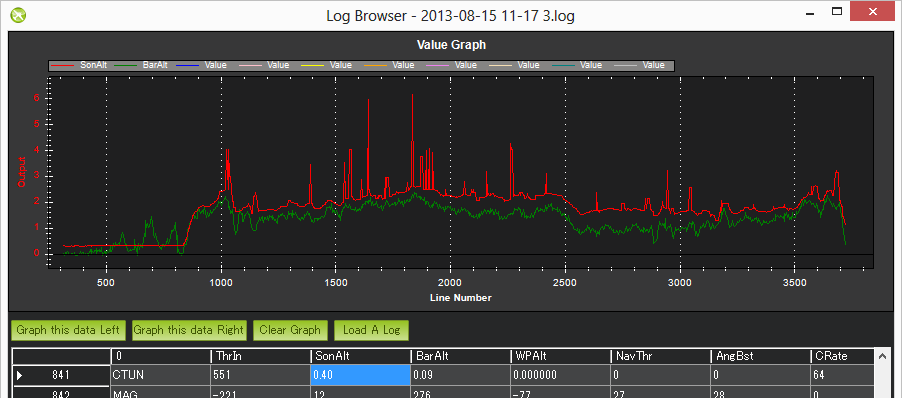
有许多可能的原因需要调查:
声纳容易受到各种来源的 "噪音 "影响,可能需要多次 "修正 "才能达到足够的性能。
与声纳在同一电路上的电调、舵机或开关 BEC 所产生的电气噪音。
使用上述 RC 滤波器和屏蔽电缆通常就足够了。
电机、电机导线、电调或 Xbee 的电磁场辐射。
声纳特别容易受到电调和电调与电机接线产生的交流 EMF 噪声的影响。
用铝(水沟)胶带包裹附近的电调及其电机接线可以大大减少这种情况的发生。
螺旋桨、螺旋桨冲刷和湍流产生的噪音。
让声纳远离螺旋桨的直接冲刷或乱流非常重要。
平衡螺旋桨(和发动机)可以起到帮助作用。
将声纳传感器安装在一个内衬泡沫塑料的小罐或小管内,可以大大减少不必要的外部声学噪音。
用橡胶或泡沫胶带包裹声纳模块板和组件,以减少传递的声学噪音。
电机、螺旋桨等产生的振动
声纳非常容易受到框架传输振动的影响。
将声纳模块安装在双面泡沫塑料或 Gel 胶带上,可以基本消除噪音源。
MB 1240 系列是 Maxbotix 制造商认为唯一适合多旋翼飞行器使用的声纳。
备注
请阅读本教程以获得全面的了解: 将超声波传感器与 Pixhawk 或 ArduPilot Mega 交互.