存档:PX4FMU 接线快速入门¶
警告
存档
PX4FMU 的使用寿命已结束,一般无法购买。本文供现有用户使用。
本文概述了 PX4FMU 和 PX4IO Board Copter 接线/安装。
PX4FMU 和 PX4IO 接线图¶
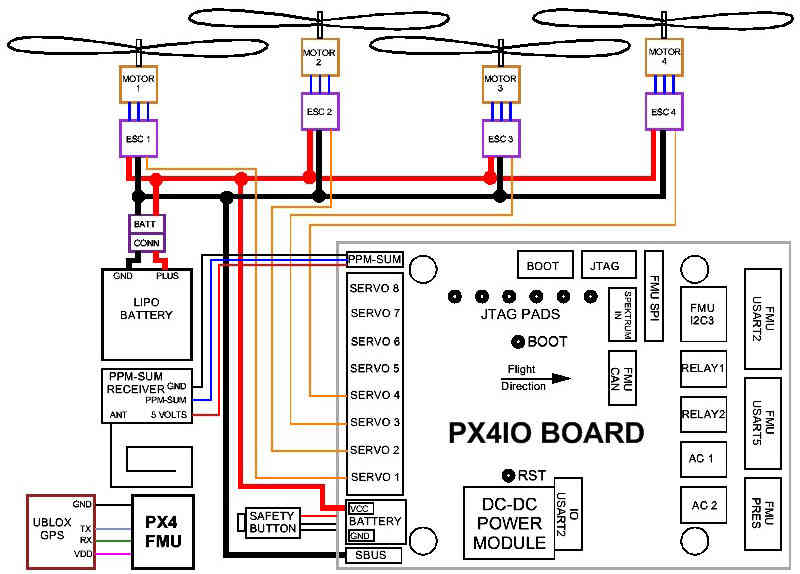
接线:PX4FMU 加 PX4IO,带 3DR 8 通道编码器和 3DR 遥测无线电¶
装配¶
将 PX4FMU 套件附带的直角 9x3 针连接器焊接到 PX4IO 板上印有 "PX4 (飞行)控制器 "的一侧。
将 9 x 3 连接器插入 PX4IO 电路板时,要将连接器上的塑料垫片朝向电路板背面,而不是向下抵住电路板。
将小型白色 PAP-02-VS 2 针连接器焊接到 PX4IO 板上电池焊盘正后方的 2 个孔中。
将 PX4IO 电路板安装到 PX4FMU 电路板上。
保护气压计免受风、阵风、运动效应和螺旋桨冲刷的影响:
按照 PX4FMU 电路板减去板间连接器的尺寸切割一块 1/2 英寸厚的软泡沫。
在连接 PX4FMU 板和 PX4IO 板之前,将一块 1/2 英寸的泡沫放在它们之间。
外壳也可以缓解气压计问题,但要确保它不会干扰罗盘(磁力计)。
将 PX4FMU 板连接到 PX4IO 板,确保所有连接器引脚平直且插入完成。
将 PX4-FMU + PX4-IO 板堆叠安装在旋翼飞行器顶部的中心和水平位置。
PX4FMU 电路板通常位于顶部。
将 PX4IO 电路板安装在顶部可能更有利于连接器的接入。
如果将 PX4IO 电路板安装在顶部,则必须将 "电路板方向 (AHRS_ORIENTATION) "参数设置为 8 即Mission Planner地面站高级参数列表中的 "左平移/横滚 180"。
标有 "FRONT "的箭头应朝向飞机前方。
Micro SD 存储卡支架应朝向飞机背面。
使用随附的支座和硬件。
将电路板的哪一面放在上面,就将一个黑色支座从底部穿过其中一个安装孔,然后从顶部拧上一个黑色塑料螺母。
对其余 3 个孔重复上述步骤。
连接 PX4FMU 和 PX4IO 电路板,确保电路板互连连接器上的引脚没有弯曲。
将另外 4 个黑色支座穿入已安装好的黑色支座。
为了减少直流电磁场对罗盘的影响,请参见 磁场干扰.
您将需要额外的减震装置,并应审查 振动阻尼.
至少应将支座安装在中间板上。
用 4 块(<1")正方形的 Kyosho "Zeal "凝胶或 "Moon Gel "垫在板的四角,将其安装到机身上。
将 GPS 朝上安装,使其能够一览无余地 "观赏 "天空。
将 GPS 电缆连接到 PX4FMU 板上的 GPS 连接器。
GPS 的位置必须确保其电缆能顺利连接到 PX4FMU 的 GPS 连接器上。
全球定位系统可以安装在一个短立柱上,以提供最广泛的卫星接入。
将 PX4FMU 和 PX4IO 电路板连接至旋翼飞行器¶
为 PX4-IO 电路板布线
PX4IO 板内置电源,最高可连接至 18 伏电压。
将带有黑色和红色导线的白色 PAP-02-VS 2 针连接器插入先前焊接在 PX4IO 板上的配套电源连接器。
电池正极是(红线),应焊接到电池红色电源线/连接器上。
蓄电池接地线为(黑线),应焊接到蓄电池的黑色蓄电池(接地)导线/连接器上。
电调的主电源输入也需要连接到这些电线和电池连接器。
也可以使用配电板。
将 PPM-Sum RC 接收器的 3 线电缆连接到离 PX4IO 电路板边缘最近的 9 x 3 角连接器的一端,信号线离电路板最远,接地线离电路板最近。
将 PX4FMU 电路板的舵机输出信号连接到电调控制输入端。
仅将信号线从电调连接至 PX4IO 板上的 3 x 9 伺服器连接器。
电机 1 的 PX4IO 板连接器位于连接器边缘,紧邻电池电源输入线。
根据您的旋翼飞行器类型,将 4 至 8 个电机的电机电调线(1、2、3、4 等)从该边缘依次插入。
您可以将电调信号线插入一个单线连接器,该连接器的针脚数量与您的旋翼飞行器相符。
电调信号线/连接器应插入 PX4IO 电路板 3 x 9 伺服连接器的最上面一行(离电路板最远)。
请注意,随 UBLOX GPS 塑料封套一起提供的电缆两端都有白色 6 针连接器,这不是 PX4FMU 板的正确电缆。
正确的长电缆装在一个单独的信封里,一端是 5 针 "米色 "连接器,另一端是 6 针白色连接器。
将正确的 GPS 电缆的白色 6 针连接器插入 GPS 的 6 针插座。
将米色 5 针连接器插入 PX4FMU 板的 5 针 GPS 插座,该插座紧邻 15 针 DF13 Mini 连接器。
将与蜂鸣器随附导线相连的 2 针连接器插入 PX4FMU 板上带有 SD 卡座一侧的蜂鸣器插座。
将 "安全按钮 "连接到 PX4IO 电路板上与电池焊盘相反一侧的安全连接器上。
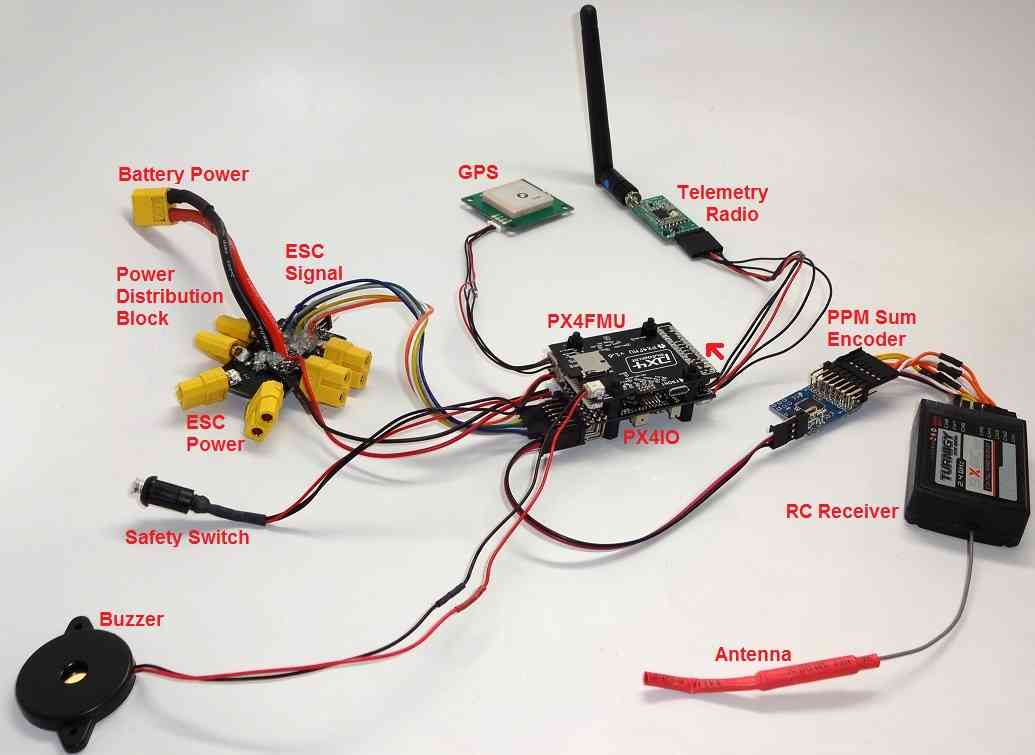
在 PX4FMU 加 PX4IO 系统中使用 3DR 遥测无线电。¶
您需要 3DR 收音机.
如上图所示,将遥测适配器电缆的黑色大接头插入 3DR 无线电。
遥测无线电如上图所示 错误 连接到 PX4IO 板角落的 FMU USART2 接口。
正确 将遥测适配器电缆的米色连接器插入 PX4IO 板 FMU UART5 插座
FMU UART5 是 PX4IO 板末端的中间插座,如图所示。 红色箭头 以上。
(FMU UARTx)是指直接从 PX4IO 板连接到 PX4FMU 的直通端口。
用于高功率应用的独立伺服电源¶
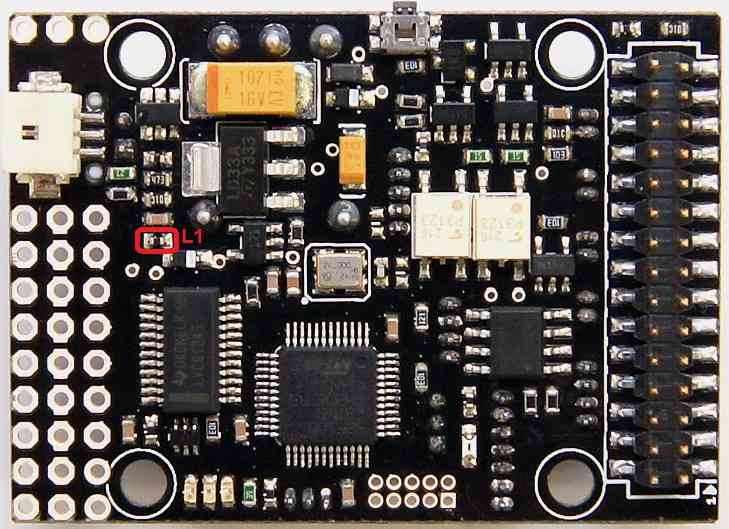
使用独立电源为 PX4IO 板的中央伺服电源引脚供电。
如果使用 PX4IO 电路板驱动大功率舵机,则需要单独提供舵机电源。
为此,请移除上图中红色圈内的 L1 铁氧体装置。
然后从独立电源向伺服连接器的一个中心引脚供电。
将独立电源的地线接到离电路板边缘最近的一个伺服连接器引脚上。
电机和电调的布线¶
不同框架形状的电机接线和顺序将在主题中介绍。 连接电调和电机.
使用带有 8 通道 PPM 编码器的标准遥控无线电接收器¶
您可以使用带有 8 通道 PPM 编码器的标准无线电接收器来代替 PPM-SUM 接收器。
8 通道 PPM 编码器是 可从 jDrones 购买.
将一个 3x8 直角连接器从顶部焊接到 8 通道 PPM 编码器电路板的一端。
将 3x8 连接器朝上并朝向远处,在 8 通道 PPM 编码器电路板的右边缘焊接一个 3x1 直角连接器。
用 5-8 个母头对母头伺服跳线将接收机的 5-8 个输出通道连接到 8 通道编码器的输入端(信号线离电路板最远)。
用 3 线电缆将编码器的 PPM-SUM 输出连接至 PX4IO 电路板的 PPM 总和输入(1x3 连接器)。
备注
如果您使用的是 3DR PPM 编码器,请务必了解在校准发射机时很可能需要将飞行电池连接到 PX4IO,因为 USB 端口本身无法提供足够的电力。
兼容的遥控 (RC) 接收器¶
PX4FMU 兼容 PPM 遥控 (RC) 接收器、Futaba S.Bus 接收器以及 Spektrum DSM、DSM2 和 DSM-X 卫星接收器。对于传统的单线每通道 (PWM) 接收器,可使用 PPM 编码器将接收器输出转换为 PPM-SUM。有关兼容接收机及其连接方式的信息,请参见 此维基页面.

FRSky Taranis 发射器¶