存档:APM2.x 接线快速入门¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
本文提供了有关如何为 APM2.x 供电并连接其最重要外设的高级信息。
APM 接线图¶
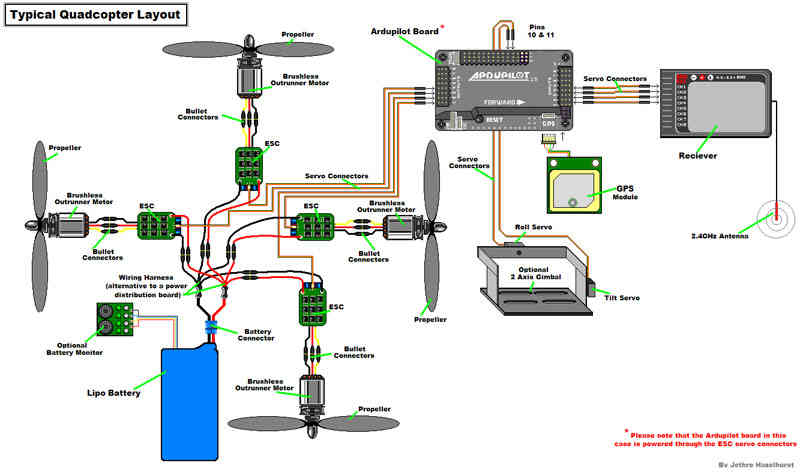
下图概述了 APM2 与接收器、电调、GPS 甚至相机云台的连接方式。
为(飞行)控制器供电¶
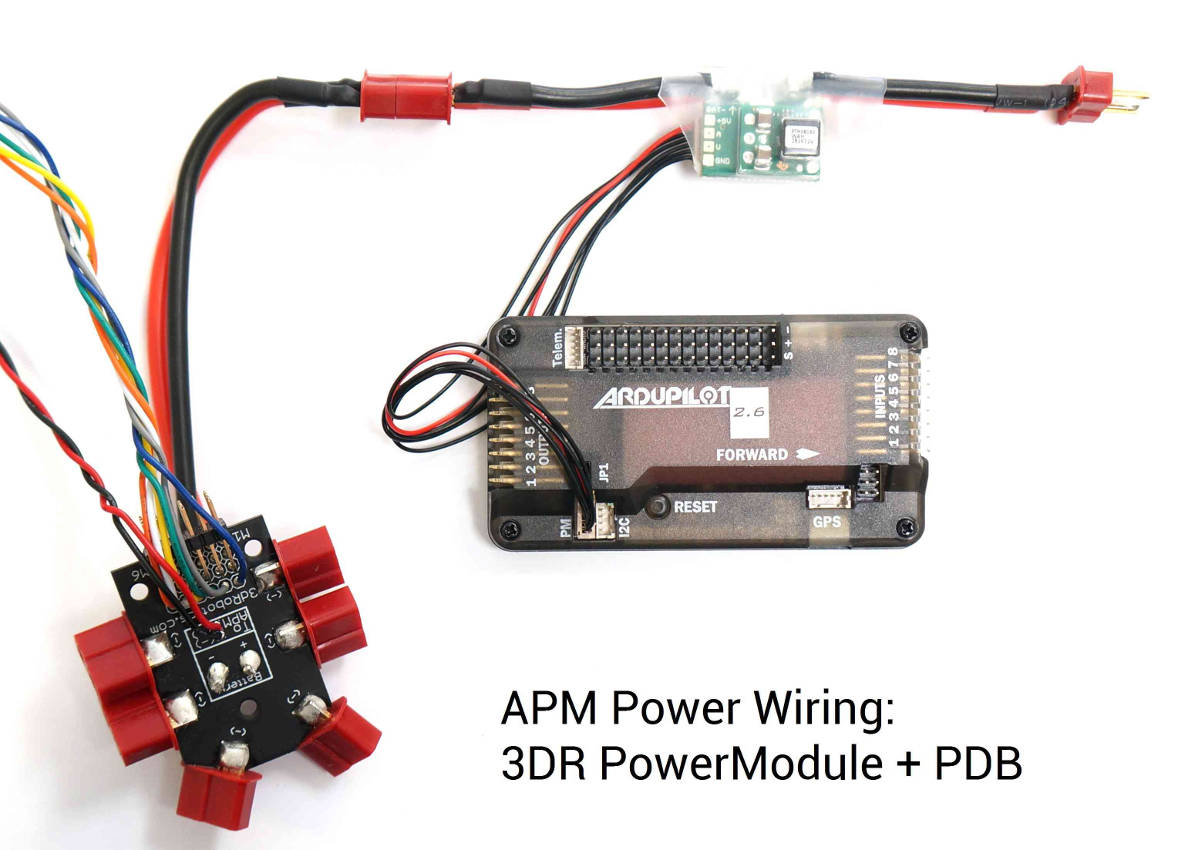
为 APM2.x 供电的最简单方法是使用 3DR 电源模块 使用锂电池。
要为电源模块接线,请将电源模块上的红黑双线电缆连接至 PDB 红黑双线。使用 6 芯电缆将电源模块连接至 APM PM 端口。将 PDB 多线电缆连接至 APM 输出信号引脚,其中 M1 线连接至标有 1 的信号引脚,M6 线连接至信号引脚 6 等。更多详情,请参阅上述链接。
电源模块无法为舵机和其他外围设备供电。有关更多信息/替代方案,请参阅 为 APM2 供电.
连接电调和电机¶
连接电调和电机 说明了如何设置连接以及每个机架的电机配置设置。
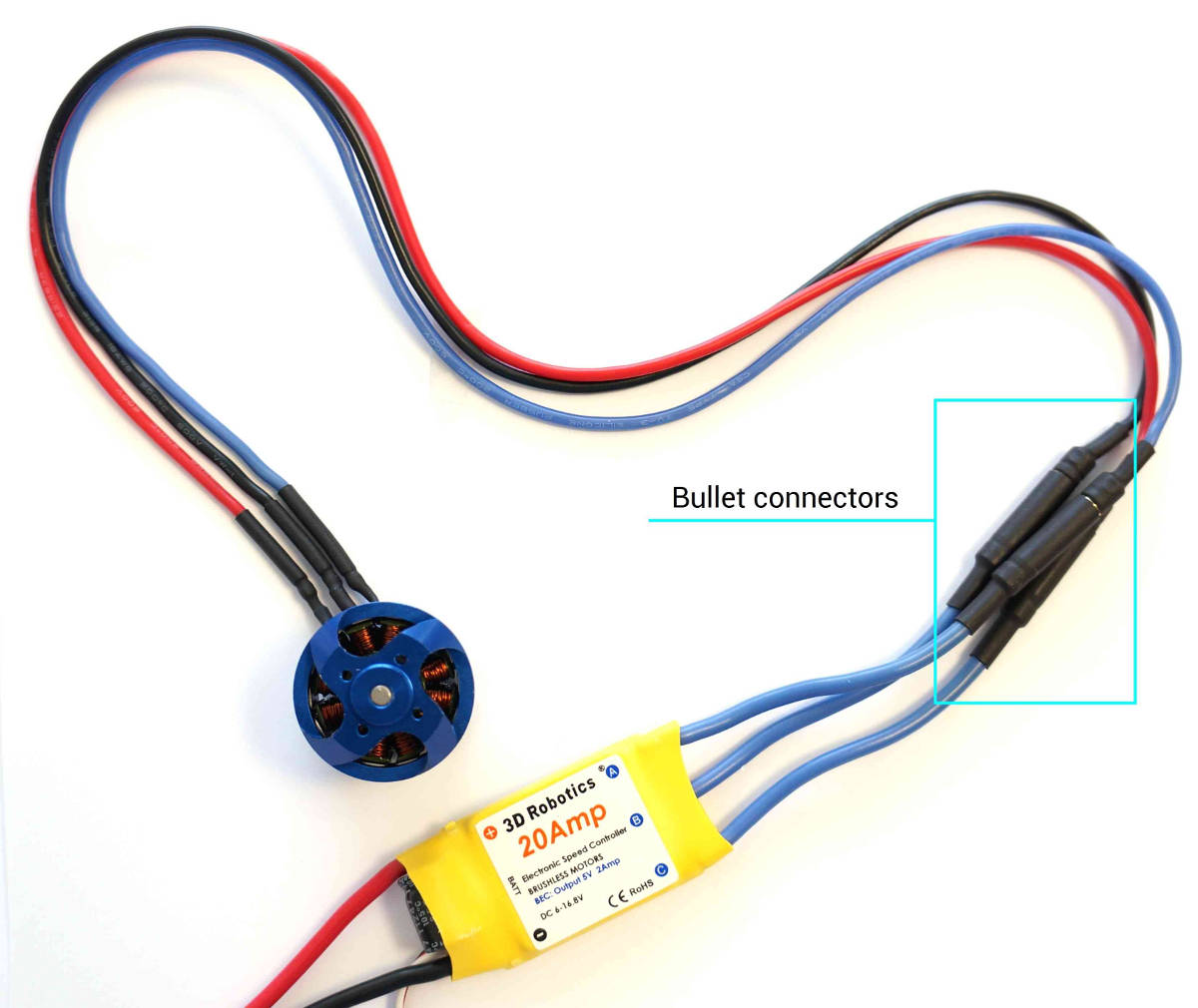
您需要将电机电缆连接到电子调速器 (ESC) 的子弹头连接器上(每个电机只能连接到一个 ESC)。
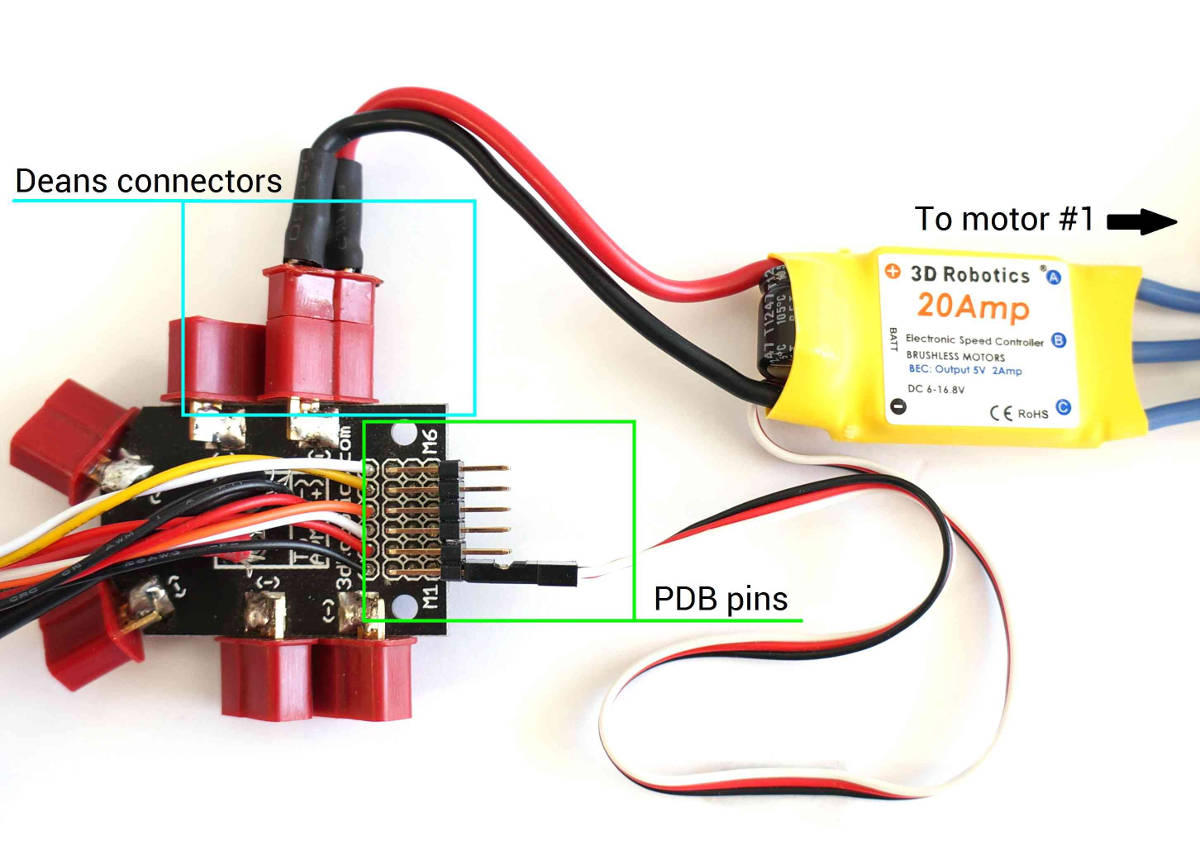
将电调的迪恩斯连接器连接至电源分配板 (PDB) 的迪恩斯连接器。根据电机编号将三线电缆从电调连接至 PDB 信号引脚(请参阅上面的链接,查找车架的电机编号配置)。将电机 1 的电调连接至标有 M1 的 PDB 引脚,将电机 6 的电调连接至标有 M6 的引脚,等等。